در این مطلب، ویدئو آزمایشگاه 7: الگوریتم RRT و RRT* در Matlab با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 1:07:46
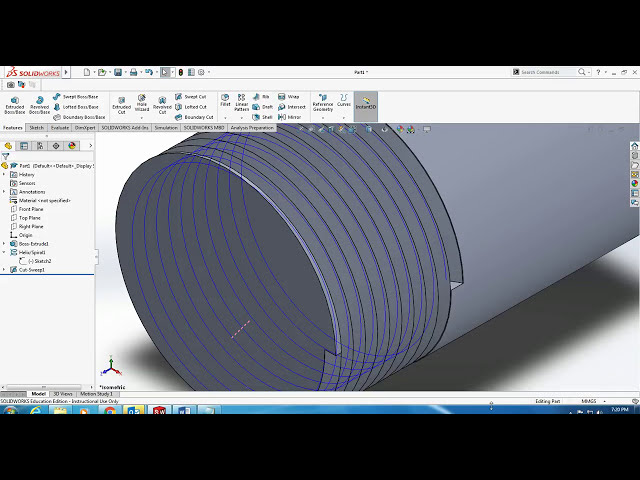
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
01 =>03
سلام به
2
03 =>07
همه امیدوارم که از سلامتی خوبی برخوردار باشید
3
07 =>09
به جلسه دیگری از آزمایشگاه رباتیک در این آزمایشگاه خوش آمدید،
4
09 =>11
5
11 =>14
6
14 =>17
7
17 =>21
8
22 =>24
اگر به یاد داشته باشید که از
9
24 =>27
سخنرانی برنامه ریزی حرکت و برنامه ریزی مسیر
10
27 =>30
که ما
11
30 =>33
rit را مطالعه کردیم یا به سرعت در حال کاوش هستیم، الگوریتم ستاره rrt و rt را پیاده سازی خواهیم کرد. درختان تصادفی
12
33 =>35
و ما همچنین
13
35 =>37
دو نوع مختلف از
14
37 =>39
این الگوریتم را مطالعه کردیم،
15
39 =>42
بنابراین اساساً کاری که این الگوریتم انجام می دهد این است
16
42 =>45
که
17
45 =>47
جستجوها را پیدا می کند یا مسیری را
18
47 =>51
از گره شروع به گره هدف پیدا می کند،
19
51 =>55
بنابراین فقط یک مرور سریع
20
55 =>57
از الگوریتم rit
21
57 =>01:00
تا هنر انجام شود، نشان دهنده
22
01:03 =>01:05
23
01:07 =>01:11
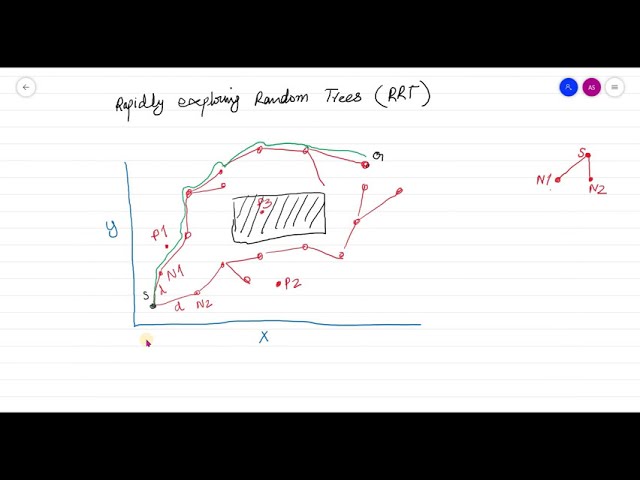
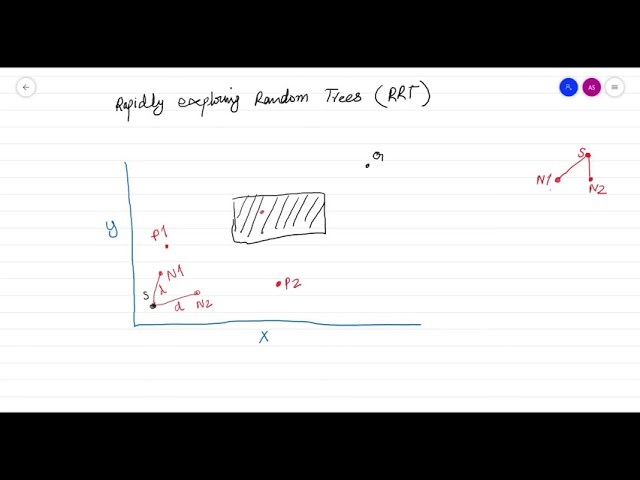
کاوش سریع است. درختهای تصادفی،
24
01:17 =>01:21
بنابراین چگونه این الگوریتم کار میکند
25
01:21 =>01:22
، فرض کنید که
26
01:22 =>01:26
این
27
01:26 =>01:30
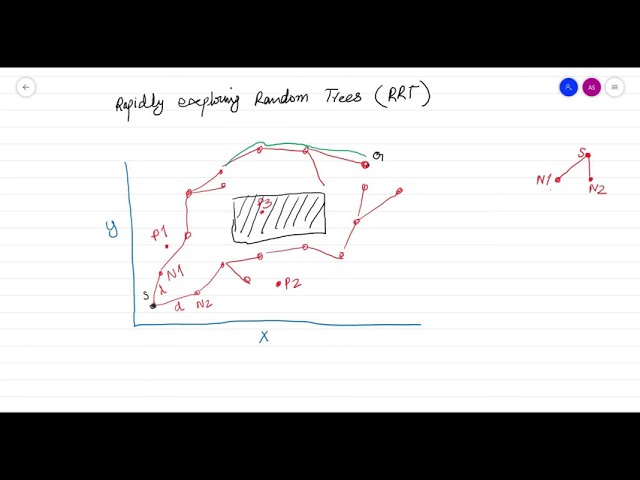
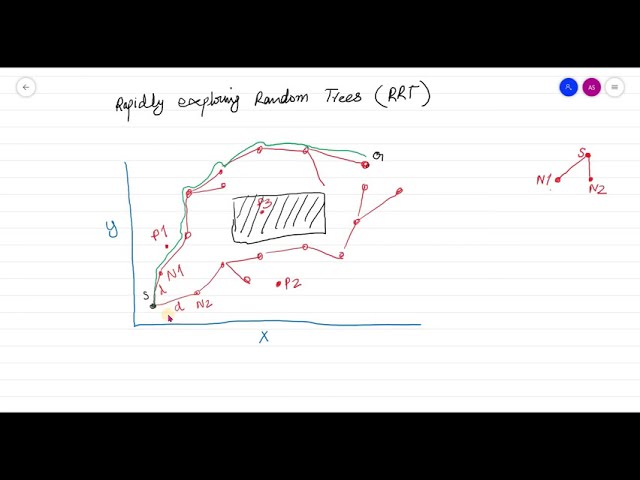
فضای کاری یا فضای پیکربندی ما است
28
01:30 =>01:32
و
29
01:32 =>01:36
بنابراین این محور x است، ما محور y داریم،
30
01:36 =>01:38
بنابراین اولین چیز این است که این الگوریتم
31
01:38 =>01:40
یک نقطه را در هر جایی نمونهبرداری میکند،
32
01:40 =>01:43
33
01:43 =>01:45
اما قبل از آن باید شروع خود را تعریف
34
01:45 =>01:49
کنیم و گره های هدف، بنابراین بیایید بگوییم
35
01:49 =>01:52
این گره شروع ما است،
36
01:52 =>01:57
بیایید آن را گره شروع بنامیم
37
02:02 =>02:04
و این اینجا
38
02:04 =>02:09
گره هدف یا گره هدف است که ما در اینجا داریم،
39
02:14 =>02:17
بنابراین در اینجا ما یک مانع داریم. بگوییم که
40
02:17 =>02:20
ما این مانع را
41
02:27 =>02:30
خوب می نامیم، بنابراین چگونه این الگوریتم
42
02:30 =>02:34
شروع می شود که
43
02:34 =>02:37
ابتدا آن را
44
02:37 =>02:40
شامل می شود و این گره شروع را در درخت
45
02:40 =>02:42
46
02:42 =>02:45
می گنجاند و زمانی که گره شروع شما در یک
47
02:45 =>02:46
درخت قرار می گیرد،
48
02:46 =>02:49
بنابراین از یک نقطه تصادفی
49
02:49 =>02:50
در
50
02:50 =>02:53
محیط شما یا در فضای کاری شما نمونه برداری می کند.
51
02:53 =>02:54
فضای پیکربندی،
52
02:54 =>02:56
بنابراین بیایید بگوییم این نقطه تصادفی ما
53
02:56 =>02:58
در اینجا است
54
02:58 =>03:02
و این است که آن را p1 می نامیم
55
03:02 =>03:06
و حالا آنچه انجام می دهد، الگوریتم ها
56
03:06 =>03:09
بررسی می کنند که آیا این نقطه
57
03:09 =>03:10
uh
58
03:10 =>03:14
در داخل مانع است یا خیر
59
03:14 =>03:16
و
60
03:16 =>03:17
آیا
61
03:17 =>03:20
و اگر این نقطه
62
03:20 =>03:22
مانع نیست
63
03:22 =>03:23
و سپس
64