در این مطلب، ویدئو آموزش شبیه سازی Catia V5 برای مبتدیان (قسمت اول) با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:09:18
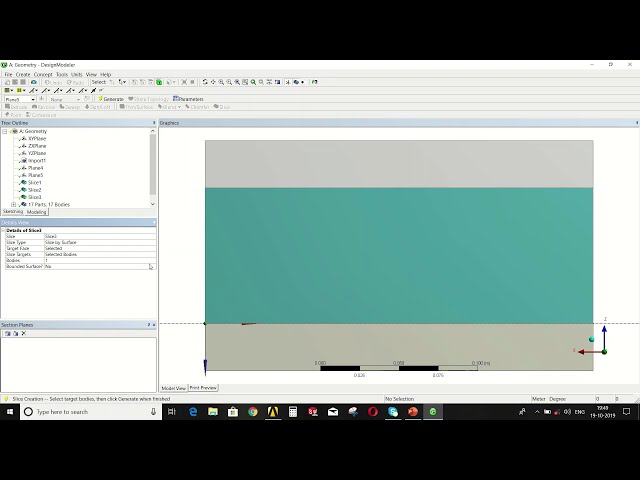
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
01 =>04
سلام بچه ها در این ویدیو به شما نشان می دهم
2
04 =>10
که چگونه می توانیم این فاصله را در داخل سیلندر شبیه سازی
3
10 =>15
کنیم با توجه به
4
15 =>18
مکانیزم پیستون و سیلندر
5
18 =>21
مکانیسمی دارد که حرکت استوانه ای را می شناسید
6
21 =>28
پس بیایید ببینیم چگونه می توانیم
7
28 =>33
شبیه سازی پیستون و سیلندر را
8
33 =>37
به این سادگی انجام دهیم. شما مجرد هستید این قسمت
9
37 =>41
به سادگی بروید شروع کنید و در اینجا
10
41 =>47
ماکت دیجیتالی انیمیشن آمریکا خوب
11
47 =>51
است بنابراین میز کار شبیه سازی
12
51 =>55
چیزهای مختلفی در اینجا وجود دارد قبل از شروع
13
55 =>59
هر کاری باید قسمتی را که نمی تواند حرکت کند تعمیر کنیم
14
59 =>01:00
15
01:00 =>01:04
بنابراین در اینجا سیلندر نمی تواند حرکت کند اما
16
01:04 =>01:07
فقط سیلندر من متاسفم که
17
01:07 =>01:12
پیستون به سمت داخل بالا می رود و
18
01:12 =>01:19
ورزشکار جهانی پس بیایید این قسمت را درست کنیم این
19
01:19 =>01:24
قسمت متن است روی آن
20
01:24 =>01:27
کلیک کنید مکانیسم جدید اینجا کلیک کنید مکانیسم جدید و می توانید
21
01:27 =>01:30
نام مکانیزم را همانطور
22
01:30 =>01:37
که می خواهید اینجا بنویسید. شبیه سازی 1 یا
23
01:37 =>01:43
مکانیزم یک همانطور که می خواهید بیایید بگوییم
24
01:43 =>01:46
مکانیسم یا هیچ چیز به
25
01:46 =>01:52
اندازه کافی آسان نیست، خوب حالا باید روی
26
01:52 =>02:00
قسمت ثابت کلیک کنیم، این یکی خوب است
27
02:00 =>02:03
وقتی روی برنامه های کاربردی در mecha کلیک می کنید nism
28
02:03 =>02:06
این مکانیزم یک یا نام
29
02:06 =>02:11
دارای درجه آزادی 0 است، به این معنی است
30
02:11 =>02:13
که می تواند به راحتی شبیه سازی شود،
31
02:13 =>02:21
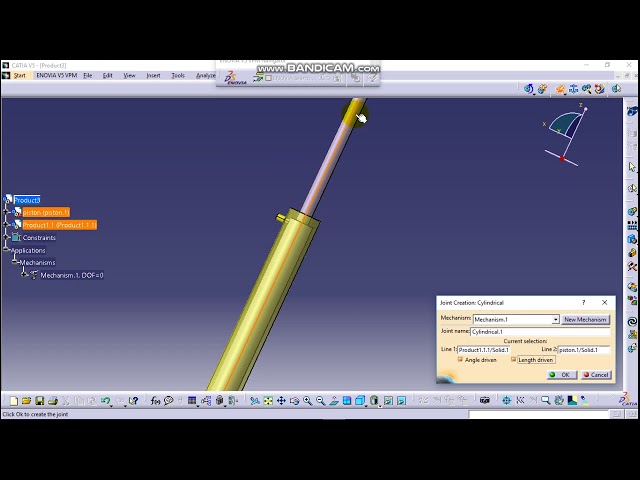
بنابراین به سادگی به این قسمت مفصل استوانه ای بروید،
32
02:21 =>02:26
اما در اینجا انواع مفصلی مانند اتصالات چرخشی وجود دارد.
33
02:26 =>02:29
34
02:29 =>02:31
35
02:31 =>02:36
36
02:36 =>02:40
مفصل چیزهای مختلفی
37
02:40 =>02:44
وجود دارد که در اینجا اتصالات مختلفی وجود دارد بنابراین
38
02:44 =>02:48
در مهارت پیستون و سیلندر یک
39
02:48 =>02:53
مفصل استوانه ای روی آن کلیک کنید و
40
02:53 =>02:55
اینجا نام
41
02:55 =>02:58
مکانیزم یک مکانیسم است و نام اتصال
42
02:58 =>03:00
استوانه ای است همانطور که در اینجا
43
03:00 =>03:04
اتصال استوانه ای را انتخاب می کنیم و نیاز دارد. دو خط
44
03:04 =>03:09
خط 1 و خط 2 که به معنی
45
03:09 =>03:12
مرکز سیلندر و مرکز
46
03:12 =>03:17
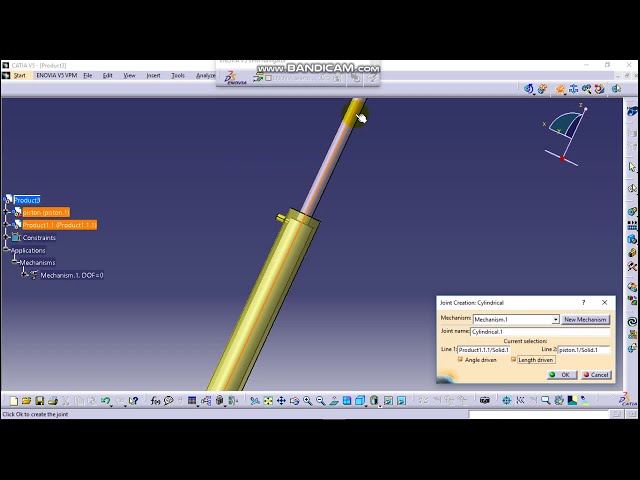
پیستون است، بنابراین
47
03:17 =>03:21
ممکن است در اینجا ممکن است ریون یا
48
03:21 =>03:26
زبان رانده زاویه دار باشد یا هر دوی این دو، بنابراین در
49
03:26 =>03:30
این مورد نه یکی ممکن است مرکز باشد.
50
03:30 =>03:32
سیلندر پس روی
51
03:32 =>03:36
مرکز سیلندر و خط
52
03:36 =>03:40
کلیک کنید شاید مرکز پیستون خوب کلیک کنید حالا زاویه رانده
53
03:40 =>03:42
شده زاویه دارد یا حتی برای این مورد
54
03:42 =>03:44
اجازه دهید نامش را بگذاریم ممکن است کاربردی نباشد کابل
55
03:4




![فیلم آموزشی: [Autodesk Inventor Enterprise Education and Training] 2 6 1 مقدمه ای بر دستورات طراحی 1](http://pezhvak24.ir/dl/wood/VjxWaJOjs_simage2.jpg)