در این مطلب، ویدئو آموزش مهندسی سیستم های مکاترونیک CATIA – عملیات درب خودرو با مدلیکا با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:04:53
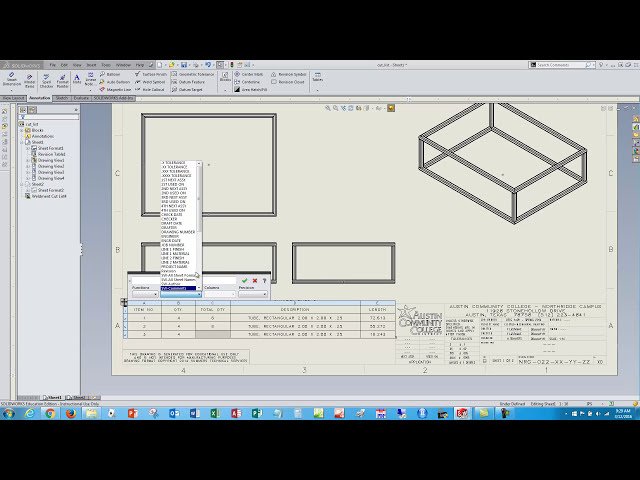
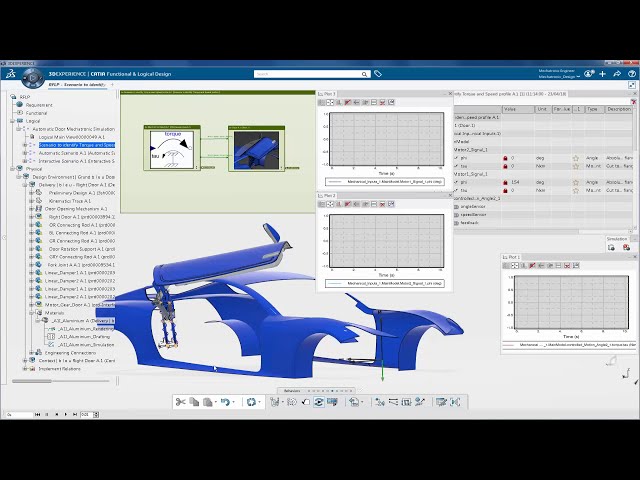
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
10 =>13
سلام به دموی فرآیند ظریف تر
2
13 =>16
در این نسخه ی نمایشی خوش آمدید،
3
16 =>18
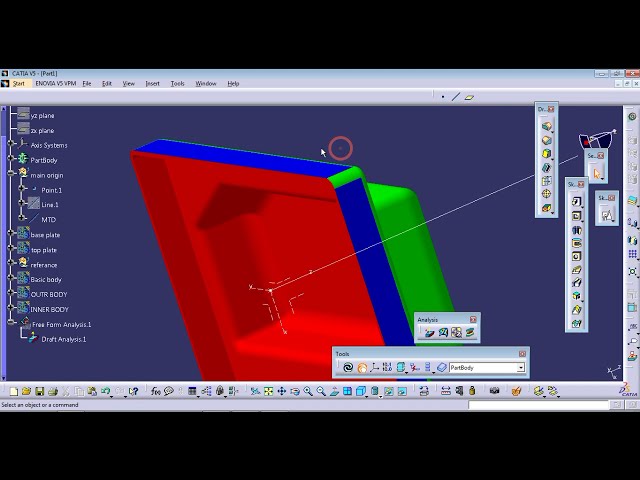
نحوه تولید مدل amma delica از یک
4
18 =>21
مدل CATIA CAD و نحوه رانندگی آن
5
21 =>23
با استفاده از مدل های مختلف ellika را خواهید دید.
6
23 =>25
مکانیسم درب ماشین آبی برای
7
25 =>28
نمایش روند باز شدن درب استفاده می شود.
8
28 =>30
مکانیسم شامل لیستی از
9
30 =>34
اتصالات مهندسی موجود در مکانیزم است،
10
37 =>40
حالا بیایید با مکانیزم بازی کنیم زیرا
11
40 =>42
می بینید که از دو دستور برای کنترل
12
42 =>45
عملکرد درب استفاده می شود، لطفاً مقادیر زاویه را در نظر داشته باشید
13
45 =>48
که همان مقادیر زاویه
14
48 =>51
در شبیه سازی دینامیکی استفاده می شود، اکنون
15
51 =>53
به سمت معماری منطقی در ابتدا
16
53 =>55
باید مقادیر مختلف گشتاور
17
55 =>57
مورد نیاز برای به حرکت درآوردن مفاصل چرخشی
18
57 =>01:00
مکانیزم درب را پیدا کنید تا
19
01:00 =>01:02
بتوانید یک نمایش ماژول از
20
01:02 =>01:05
مکانیسم درب ایجاد کنید تا این کار را انجام دهید، یک
21
01:05 =>01:08
فرمان با یک کلیک در دسترس است که به نام
22
01:08 =>01:11
تولید از سینماتیک در دسترس است.
23
01:17 =>01:20
هنگامی که به داخل مدل می روید، می توانید
24
01:20 =>01:22
کلاس های مختلف مختلفی مانند
25
01:22 =>01:24
اتصالات مهندسی مختلف را ببینید
26
01:24 =>01:27
لطفاً توجه داشته باشید که
27
01:27 =>01:30
قطعات مکانیکی مانند درب
28
01:30 =>01:32
دارای ویژگیهای فیزیکی مانند
29
01:32 =>01:33
30
01:33 =>01:37
اینرسی وزنی و غیره هستند.
31
01:37 =>01:40
32
01:40 =>01:48
33
01:48 =>01:50
34
01:50 =>01:53
مکانیزم درب شما می توانید گشتاور را
35
01:53 =>01:55
به اتصالات چرخشی اعمال کنید حلقه بازخورد
36
01:55 =>01:58
با کنترل کننده PID برای تولید گشتاور استفاده می شود
37
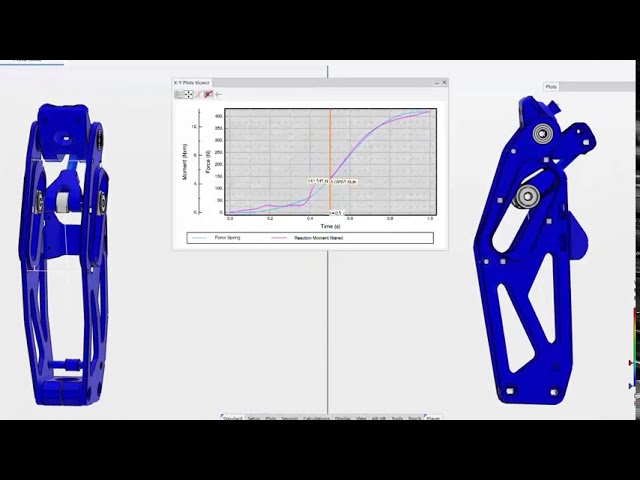
01:58 =>02:06
اکنون می توانید مدل را در
38
02:06 =>02:08
این زاویه شبیه سازی شبیه سازی کنید و مقادیر گشتاور
39
02:08 =>02:14
در سناریوی دوم ترسیم شده است.
40
02:14 =>02:16
41
02:16 =>02:20
درب بلوک منطقی
42
02:20 =>02:22
دوباره برقرار میشود
43
02:24 =>02:27
، کنترلکننده از
44
02:27 =>02:29
کتابخانه درب اتوماتیک در زیر
45
02:29 =>02:36
بسته مولفهها نمونهسازی میشود،
46
02:36 =>02:38
کنترلکننده برای استفاده از منطق حالت طراحی شده است،
47
02:38 =>02:40
کنترلکننده وضعیت خود را بسته
48
02:40 =>02:43
به مقادیر زاویه بازخورد ناشی
49
02:43 =>02:47
از موتورهای DC تغییر
50
02:47 =>02:49
میدهد. همان
51
02:49 =>02:56
کتابخانه درب اتوماتیک مدل موتور DC
52
02:56 =>02:58
در کتابخانه درب اتوماتیک
53
02:58 =>03:01
und موجود است از بسته مولفهها در حالی که
54
03:01 =>03:04
دو اتصال چرخشی مختلف را در دو موتور
55
03:04 =>03:06
56
03:06 =>03:10
میرانید، پارامتری
57
03:23 =>03:25
کردن مقادیر ورودی مدل موتور از
58
03:25 =>03:29
جدول اعداد صحیح امکانپذیر است، میتوانید تمام
59
03:2





![فیلم آموزشی: [ترفندهای Revit] نحوه ایجاد الگوی پیچیده کف با زیرنویس فارسی](http://pezhvak24.ir/dl/wood/kMLy4LS5OjYimage2.jpg)