در این مطلب، ویدئو [آموزش ROS] نحوه باز کردن یک مدل solidworks در gazebo با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 1:21:47
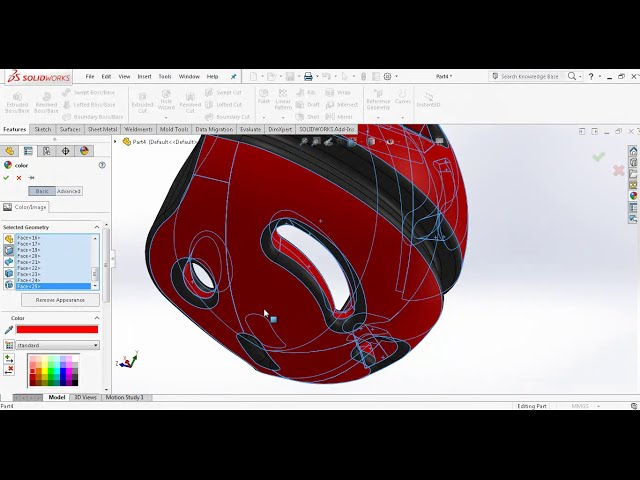
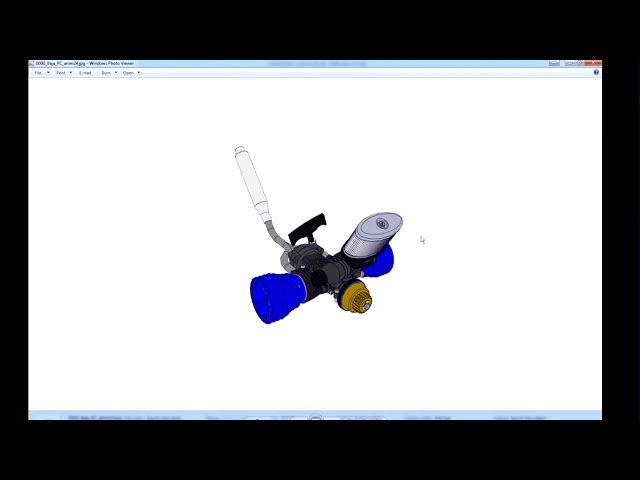
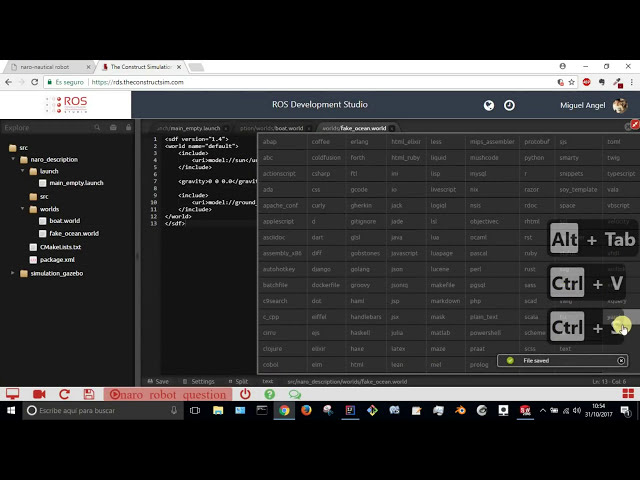
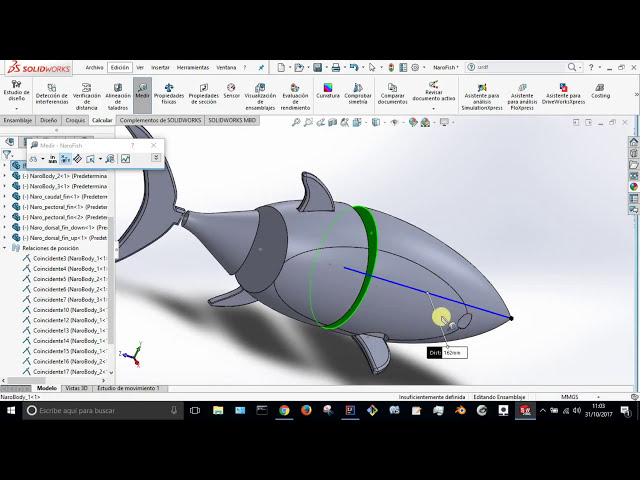
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>05
[Music]
2
07 =>11
سلام و به این آموزش ویدیویی در مورد
3
11 =>16
نحوه وارد کردن مدل ها از SolidWorks به
4
16 =>19
gazebo خوش آمدید، بنابراین هدف این آموزش این
5
19 =>22
است که
6
22 =>25
دانش اولیه را به شما ارائه دهد،
7
25 =>29
بنابراین یک مدل سه بعدی در مجموعه SolidWorks
8
29 =>32
که بیان شده است و می توانید آن را جابه جا کنید
9
32 =>42
و به همین ترتیب از این مدل به
10
42 =>48
مدلی در اینجا در gazebo شبیه سازی شده با استفاده از
11
48 =>52
Ross بروید، بنابراین این هدف این
12
52 =>57
آموزش است، بنابراین بیایید شروع کنیم بنابراین
13
57 =>01:01
اولین چیزی که ابتدا باید انجام شود، بنابراین شما
14
01:01 =>01:05
به یک مدل SolidWorks نیاز دارید این یک
15
01:05 =>01:09
مدل SolidWorks است. رباتی به نام
16
01:09 =>01:14
باریک که توسط فاضلاب هشت دستی ایجاد شده
17
01:14 =>01:21
و اساساً یک ربات ماهی است
18
01:21 =>01:24
من این مدل را انتخاب کردم و یک
19
01:24 =>01:26
مدل از این ربات ایجاد کردم
20
01:26 =>01:31
زیرا دارای قطعات متحرک است و نیاز به اشکال سفارشی دارد
21
01:31 =>01:35
بنابراین نمی توانید از هر نوع اشکال هندسی استفاده کنید.
22
01:35 =>01:39
برای ساخت آن و همچنین به دلیل
23
01:39 =>01:41
اینکه
24
01:41 =>01:46
ممکن است به آموزش های دیگری در مورد شناوری
25
01:46 =>01:50
و ربات هایی که در اطراف شناور هستند منجر شود، بنابراین
26
01:50 =>01:52
اگر به این موضوعات علاقه مند هستید، لطفاً
27
01:52 =>01:55
نظر خود را در زیر بیان کنید.
28
01:55 =>01:59
و بله، بیایید شروع کنیم،
29
01:59 =>02:03
بنابراین ابتدا این مدل را داریم و
30
02:03 =>02:05
از قطعات مختلف تشکیل شده است و
31
02:05 =>02:10
من تمام قطعات را با
32
02:10 =>02:11
وارد کردن
33
02:11 =>02:14
آنها در اینجا و انتخاب
34
02:14 =>02:18
قطعه و سپس تخصیص روابط جمع کرده ام
35
02:18 =>02:20
تا همانطور که می بینید ما داریم
36
02:20 =>02:24
روابط مختلف برای حرکت دادن آن همانطور که باید باشد،
37
02:24 =>02:27
بنابراین اگر به آن موضوع علاقه مند هستید،
38
02:27 =>02:30
لطفاً نظر خود را بگذارید و ما یک
39
02:30 =>02:33
ویدیوی ویژه در مورد آن تهیه خواهیم کرد، اما اساساً
40
02:33 =>02:36
روابط آنها را ایجاد می کند تا بتوانید
41
02:36 =>02:39
آن را حرکت دهید همانطور که باید ربات را حرکت دهد.
42
02:39 =>02:47
بنابراین ما این بردار بالهها را در اینجا داریم که
43
02:47 =>02:51
حرکت بالا و پایین را کنترل میکنند و
44
02:51 =>02:56
سپس این دو باله را داریم
45
02:56 =>02:58
که فقط برای تثبیت استفاده میشوند و سپس
46
02:58 =>03:07
همانطور که میبینید باله دمی را دارید که
47
03:07 =>03:16
ربات را بهخوبی به جلو حرکت میدهد.
48
03:16 =>03:18
من اولین قدم چیست، بنابراین اولین قدم
49
03:18 =>03:24
این است که باید همه این مدل ها را
50
03:24 =>03:28
به صورت جداگانه وارد کنید، بنابراین این یکی این یکی
51
03:28 =>03:31
این یکی این یکی این یکی و این یکی
52
03:31 =>03:37
دو فرمت که gazebo می فهمد
53
03:37 =>03:41
اینها هستند و
54
03:41 =>