در این مطلب، ویدئو برنامه نویسی ربات با SolidWorks – مقدمه – پلاگین RoboDK با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:12:47
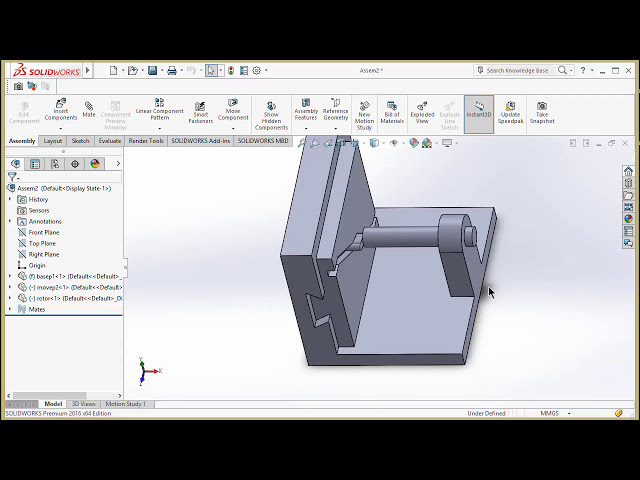
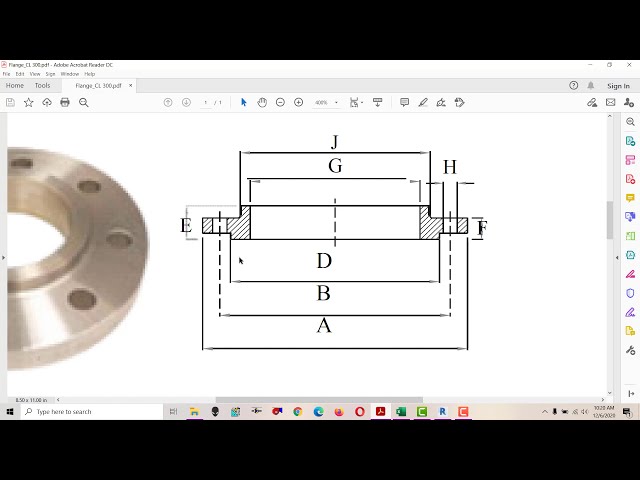
تصاویر این ویدئو:



قسمتی از زیرنویس این فیلم:
06 =>10
سلام به همه، جرمی اینجا از rebel
2
10 =>13
DK به اولین ویدیوی آموزشی خوش آمدید،
3
13 =>16
ما در حال حاضر بسیار هیجان زده هستیم که DK سه گانه را دریافت می
4
16 =>19
کنیم، زیرا ما فقط یک پلاگین برای
5
19 =>22
کار جامد منتشر کرده ایم، چه معنایی برای شما دارد، به
6
22 =>25
این معنی که ما موفق شدیم
7
25 =>27
گردش کار بین کار جامد را ساده کنیم. و Robo
8
27 =>31
DT به عبارت دیگر
9
31 =>34
انتقال از یک مدل CAD به یک
10
34 =>37
برنامه ربات واقعی برای کمک به
11
37 =>40
درک بهتر قدرت آن
12
40 =>42
افزونه سریعتر و
13
42 =>46
آسانتر می شود.
14
46 =>49
ویدیوهای آینده ما برای آن مقدمه کافی است
15
49 =>53
، بیایید
16
53 =>55
در اولین آموزش شروع به کار کنیم، من به
17
55 =>58
شما نشان خواهم داد که چگونه
18
58 =>01:03
منحنی ها و هدف های قطعات SolidWorks را در
19
01:03 =>01:10
Robo DG وارد کنید.
20
01:10 =>01:14
در اینجا یکی برای
21
01:14 =>01:17
هر مثالی که امروز می خواهم به شما نشان دهم
22
01:17 =>01:22
اولین مورد استفاده از فنک
23
01:22 =>01:27
آرت میت 120 IB 10 L با تفنگ جوشکاری OTS است،
24
01:27 =>01:33
بنابراین بیایید شروع کنیم، من می
25
01:33 =>01:37
خواهم کار جامد را در اینجا باز
26
01:37 =>01:41
کنم. نسخه 2019 اینجا من یک مونتاژ ساده دارم،
27
01:41 =>01:44
یک ورق فلزی، دو
28
01:44 =>01:48
دستور زاویه و یک نیمه صدا خفه کن، یک
29
01:48 =>01:50
تست جوشکاری نسبتاً آسان است که میخواهیم
30
01:50 =>01:53
همه آن قطعات را به هم وصل کنیم تا به معنای
31
01:53 =>01:55
جوشکاری در امتداد آن خطوط، آنهایی که
32
01:55 =>01:59
این خط را به آن خط و آن خط را در اینجا
33
01:59 =>02:03
به طور معمول انجام میدهیم. باید
34
02:03 =>02:05
موقعیت دقیق نقطه شروع و پایان
35
02:05 =>02:08
هر خط را بدانید و سپس آنها را
36
02:08 =>02:12
در یک حرکت خطی وارد کنید، هر چند دانستن
37
02:12 =>02:14
موقعیت دقیق هر نقطه می تواند
38
02:14 =>02:17
دشوار باشد، انتقال آن در یک
39
02:17 =>02:19
شبیه ساز ربات می تواند بدترین باشد،
40
02:19 =>02:22
اما با افزونه جدید ما موفق شدیم. برای
41
02:22 =>02:24
پیاده سازی آن به روشی سریع و آسان،
42
02:24 =>02:28
ابتدا به شما نشان می دهم که باید
43
02:28 =>02:30
افزونه را
44
02:30 =>02:34
در نسخه solid Work خود نصب و فعال کنید، من به
45
02:34 =>02:36
شما بچه ها نشان نمی دهم که چگونه این کار را انجام دهید، اما
46
02:36 =>02:38
باید پیوندی در توضیحات که
47
02:38 =>02:42
همه چیزهایی را که باید بدانید به محض
48
02:42 =>02:45
نصب صحیح افزونه به شما نشان میدهد،
49
02:45 =>02:49
باید یک برگه را در اینجا ببینید، اگر روی آن کلیک کنید،
50
02:49 =>02:52
میتوانید ببینید که ما پنج گزینه داریم، بنابراین
51
02:52 =>02:56
تنظیم خودکار منحنی بارگیری قطعات l
52
02:56 =>02:59
نقطه oad و تنظیمات هر یک از
53
02:59 =>03:02
نمونه هایی که امروز به شما نشان خواهم داد
54
03:02 =>03:05
یکی از چهار گزینه اول را پوشش می دهد. یک
55
03:05 =>03:0