در این مطلب، ویدئو ترسیم چرخش صلب در Ansys Mechanical با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:04:45
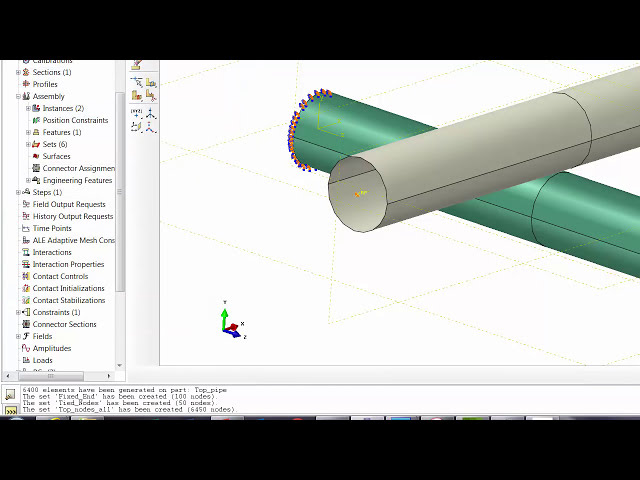
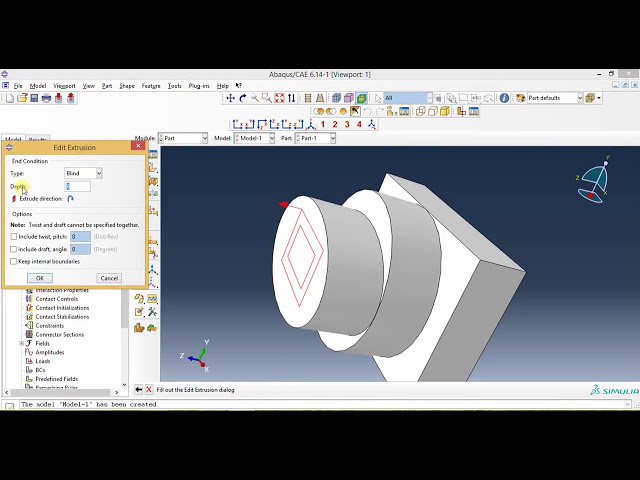
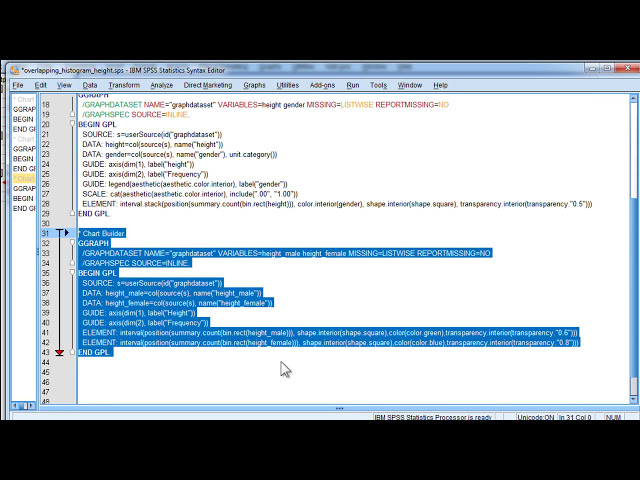
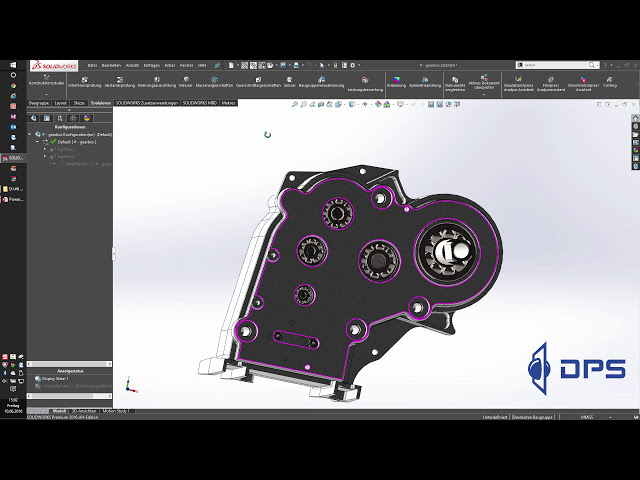
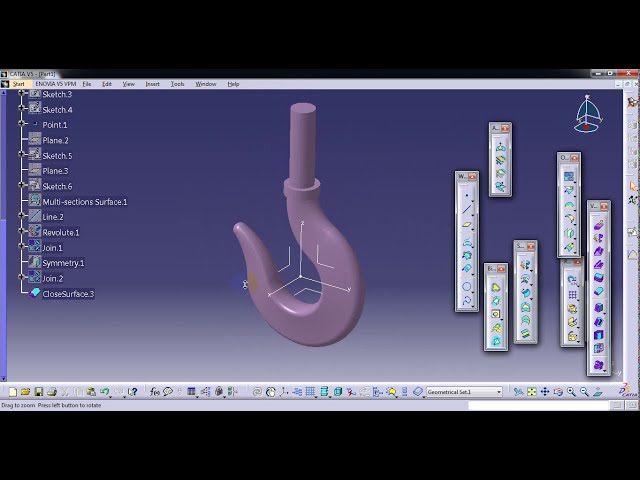
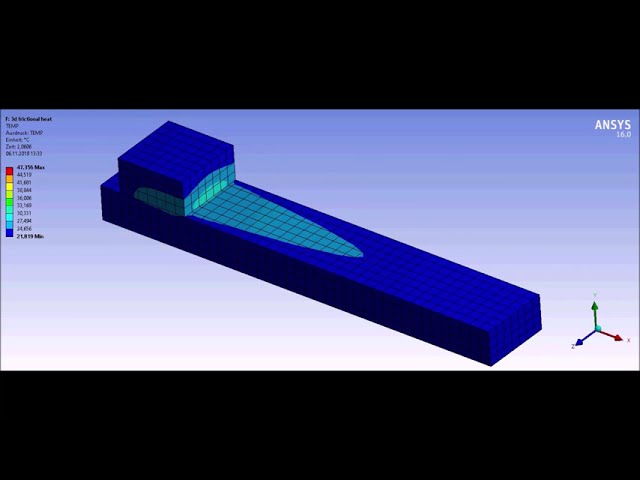
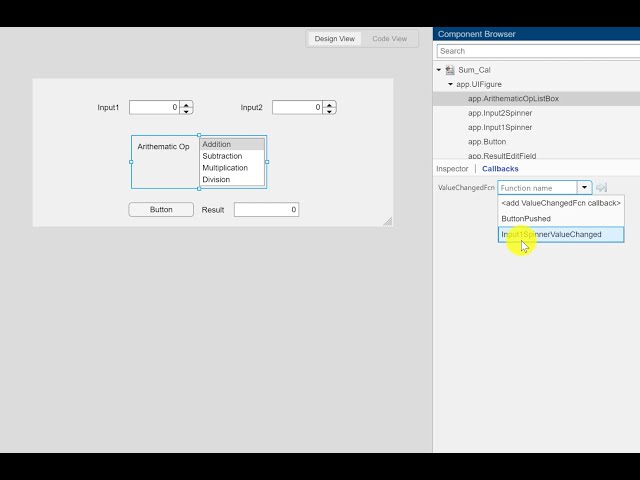
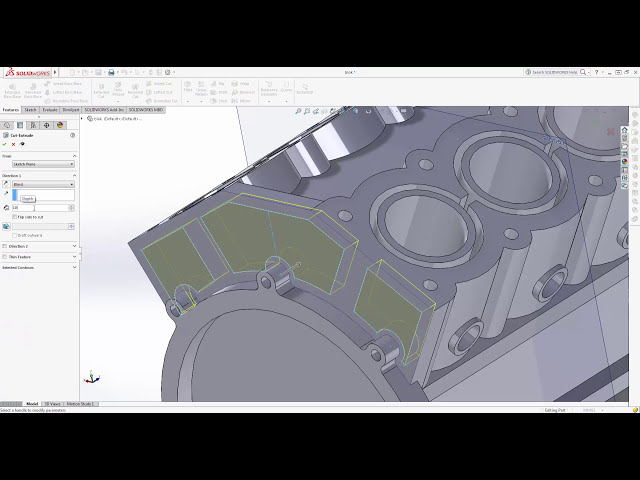
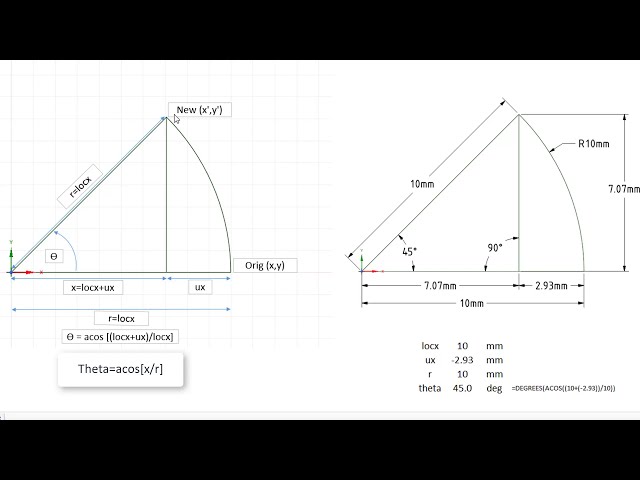
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
02 =>05
[موسیقی]
2
05 =>07
در جلسه امروز
3
07 =>10
نشان میدهیم که چگونه میتوانیم چرخش صلب را تأیید و اعمال
4
10 =>13
کنیم در نتایج یک
5
13 =>15
بلوک دارند و من یک جابجایی از راه دور
6
15 =>18
با استفاده از یک رفتار صلب
7
18 =>20
اعمال
8
20 =>22
کردهام. در واقع در سه مرحله برای
9
22 =>24
نشان دادن نتایجی که در این مورد با هم تطبیق
10
24 =>26
خواهیم داد، آنچه باید انجام دهیم این است که بفهمیم
11
26 =>31
چگونه تغییر شکلهای گرهای را با تحلیل پیشفرض تفسیر میکنیم،
12
31 =>34
13
34 =>37
سیستمهای مختصات گرهی موازی با
14
37 =>39
سیستم مختصات سراسری قرار دارند که میتوانیم واقعاً
15
39 =>42
تفسیر کنیم. به روشهای مختلف میتوانیم
16
42 =>44
آن را در یک
17
44 =>45
سیستم گوشهای استوانهای بچرخانیم، به گونهای که به
18
45 =>47
صورت محلی این تفسیر را داریم که
19
47 =>50
هر گره دارای یک سیستم وارد شده گره
20
50 =>53
است که میچرخد به طوری که X همیشه
21
53 =>55
شعاعی و Y همیشه مماس است و
22
55 =>57
این همان چیزی است که ما به آن نیاز داریم. در
23
57 =>59
این مورد برای ایجاد ریاضیاتی که
24
59 =>01:00
باید در یک نتیجه تعریف شده توسط کاربر نشان
25
01:00 =>01:03
دهیم، انجام دهیم، بنابراین اگر اکنون انحراف کوچک را
26
01:03 =>01:05
در مقابل انحراف بزرگ در یک
27
01:05 =>01:08
انحراف کوچک در نظر بگیریم. تجزیه و تحلیل ما یک
28
01:08 =>01:10
تفسیر تتا بسیار کوچک داریم، بنابراین در این
29
01:10 =>01:12
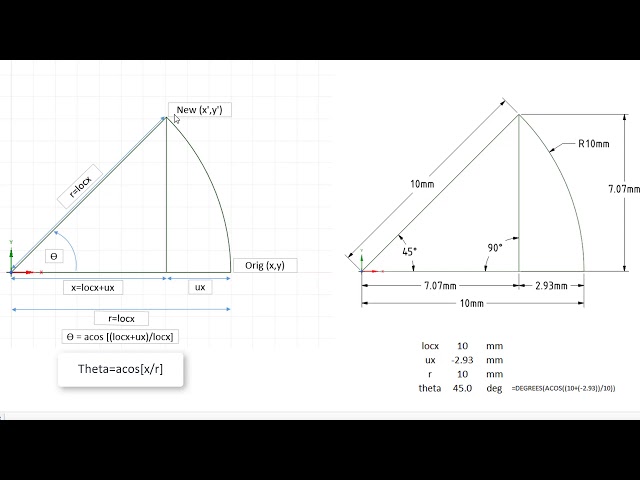
مورد از مثلثات می دانیم که
30
01:12 =>01:14
تتا سینوس برابر است با y بر R اما برای تتا بسیار کوچک
31
01:14 =>01:18
بسیار کمتر از یک رادیان پس X
32
01:18 =>01:20
در واقع برابر R یا برابر با R
33
01:20 =>01:24
و تتا سینوس فقط تتا می شود.
34
01:24 =>01:26
و سپس این رابطه به
35
01:26 =>01:29
تتا می رسد، تقریباً به Y روی R بروید
36
01:29 =>01:31
و این در واقع در
37
01:31 =>01:33
این سیستم اول است.
38
01:33 =>01:36
39
01:36 =>01:38
40
01:38 =>01:41
قرار دادن U Y تقسیم
41
01:41 =>01:43
بر log X و LOC X
42
01:43 =>01:47
تفسیر مختصات X x در
43
01:47 =>01:49
سیستم مختصات فعلی است، بنابراین تنها کاری که باید انجام
44
01:49 =>01:51
دهیم این است که شما را تایپ کنید چرا این شما هستید
45
01:51 =>01:53
چرا حل واقعی برای جابجایی u Y
46
01:53 =>01:55
تقسیم بر مقدار است. مکان X اگر
47
01:55 =>01:58
دوباره به انحراف کوچک خود برگردیم، میخواهید
48
01:58 =>02:01
تبر مکان را به دست آورید،
49
02:01 =>02:04
فاصله X در اینجا خواهد بود و Y به سادگی
50
02:04 =>02:09
مقدار جابجا شده به معنای خطی است و وقتی
51
02:09 =>02:11
روی آن کلیک میکنیم، میبینید که داریم دریافت میکنیم.
52
02:11 =>02:13
سابق در واقع
53
02:13 =>02:16
همان نتیجه ای که دوباره در آن اعمال کردیم، این
54
02:16 =>02:19
فقط برای انحراف کوچک معتبر است، اگر
55
02:19 =>02:21
تجزیه و تحلیل گوشت بزرگتری داشته باشید، در واقع
56
02:21 =>02:23