در این مطلب، ویدئو تقریب تابع انتقال | محاسبه و شبیه سازی متلب | مثال شماره 1 با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:23:58
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>02
سلام به همه و خوش آمدید به یک ویدیوی جدید
2
02 =>04
در مورد موضوعات سیستم کنترل در این
3
04 =>06
ویدیو ما در مورد
4
06 =>08
تقریب یک تابع انتقال بحث خواهیم کرد و این
5
08 =>09
مثال شماره یک ما
6
09 =>11
در این مثال است دوباره
7
11 =>13
به محاسبه مرحله به مرحله نگاه خواهیم کرد و
8
13 =>17
این موارد را تأیید خواهیم کرد. در شبیهسازیهای متلب،
9
17 =>18
قبل از اینکه به مثال خود ادامه دهیم، اجازه دهید
10
18 =>20
ابتدا به طور خلاصه در مورد چیستی
11
20 =>22
تقریب بحث کنیم و با
12
22 =>23
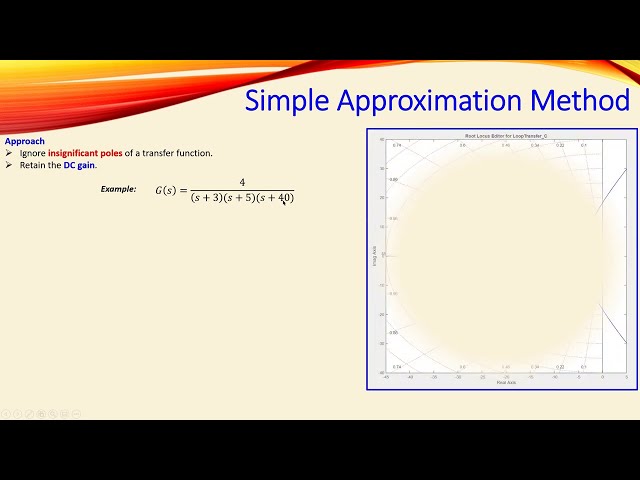
یک روش ساده شروع میکنیم
13
23 =>25
و روش ساده روش زیر را
14
25 =>27
دارد، شما باید
15
27 =>30
پالس ناچیز
16
30 =>32
تابع انتقال خود را در سیستم خود در نظر بگیرید و شما باید
17
32 =>33
بازی dc خود را برگردانید، بنابراین این
18
33 =>35
در واقع به چه معناست، بنابراین بیایید به یک
19
35 =>37
مثال نگاه کنیم، تابع انتقال زیر را داریم
20
37 =>39
که یک سیستم مرتبه سوم
21
39 =>42
دارای قطب در منهای 3 منهای 5 و
22
42 =>45
همچنین منهای 40 است. همچنین می توانید ببینید که در
23
45 =>46
این
24
46 =>48
نمودار منبع ریشه که
25
48 =>51
قطب های سیستم را در یک پیکربندی بازخورد واحد به شما نشان می دهد،
26
51 =>53
بنابراین آنچه می بینید
27
53 =>54
این است که شما
28
54 =>57
قطب را در -40 در اینجا دارید که بسیار دور است و
29
57 =>59
من f همچنین دو قطب دیگر که بسیار
30
59 =>01:01
نزدیک به محور عمودی منهای پنج
31
01:01 =>01:04
و همچنین منهای سه هستند، بنابراین این
32
01:04 =>01:07
دو قطب هستند که در واقع
33
01:07 =>01:09
از طریق پاسخ گذرا و همچنین پاسخ اشباع شده
34
01:09 =>01:11
35
01:11 =>01:13
سیستم شما تسلط خواهند داشت، اما بیایید ببینیم چه کاری باید
36
01:13 =>01:14
انجام
37
01:14 =>01:17
دهیم. از برخورد این
38
01:17 =>01:20
قطب در 40- غفلت کنید که چون بسیار
39
01:20 =>01:22
دور است در این مورد حداقل هشت
40
01:22 =>01:26
برابر دورتر از این قطب در 5- است
41
01:26 =>01:28
و البته
42
01:28 =>01:32
از این منهای سه نیز بسیار دورتر است،
43
01:32 =>01:34
بنابراین ما می توانیم پس از آن موارد زیر را بگویید و
44
01:34 =>01:36
ما البته باید بهره dc را نیز حفظ کنیم
45
01:36 =>01:39
به طوری که پاسخ حالت پایدار
46
01:39 =>01:42
سیستم یکسان باشد،
47
01:42 =>01:42
بنابراین
48
01:42 =>01:46
با حذف یا با
49
01:46 =>01:48
حذف واقعی این قطب در منهای چهار
50
01:48 =>01:49
t
51
01:49 =>01:51
، طبیعتاً باید یک سیستم کاهش یافته
52
01:51 =>01:54
داشته باشیم که پس این سیستم باشد، بنابراین
53
01:54 =>01:57
برای اینکه بهره dc را نیز حفظ
54
01:57 =>02:00
کنیم، در واقع صورتگر را بر این 40 تقسیم می کنیم،
55
02:00 =>02:03
بنابراین در واقع 4 روی 40
56
02:03 =>02:06
خواهد بود و شما قطب خود را در منهای
57
02:06 =>02:08
40 حذف می کنید.
58
02:08 =>02:10
د