در این مطلب، ویدئو جفت های مکانیکی SolidWorks – GEARS – در کمتر از 10 دقیقه! با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:09:52
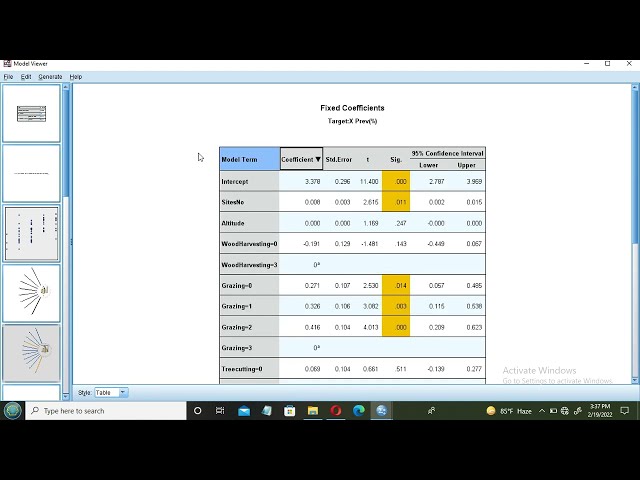
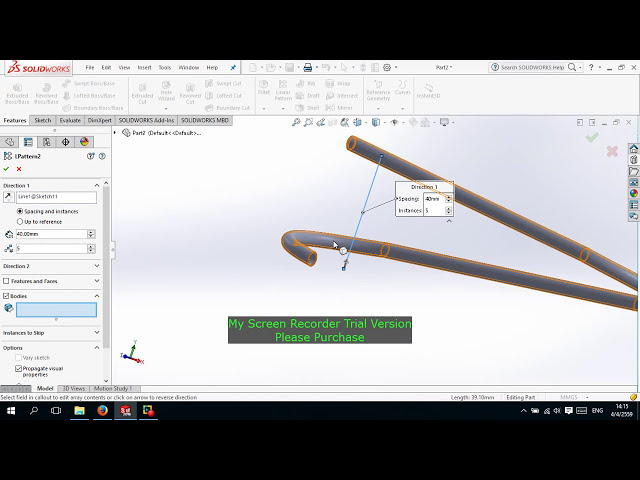
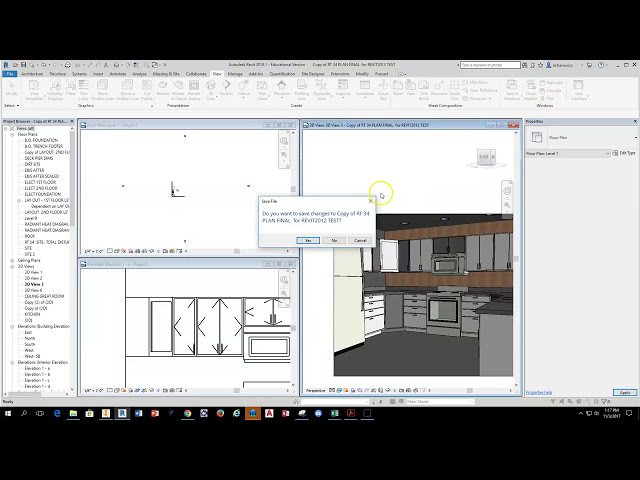
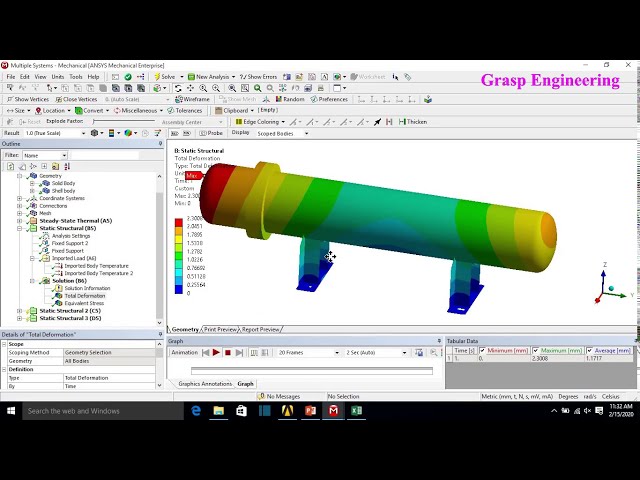
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>02
حتی اگر میتوانیم از Solidworks
2
02 =>04
بخواهیم تعامل فیزیکی
3
04 =>06
بین اجسام را تشخیص دهد و با
4
06 =>08
5
08 =>10
استفاده از
6
10 =>12
7
12 =>14
مطالعات حرکتی تجزیه و تحلیل حرکت و پارامترهایی
8
14 =>16
مانند خواص ارتجاعی اصطکاکی و
9
16 =>19
گرانش یک راه آسان برای شبیه سازی
10
19 =>21
تعامل بین اجزای رزوه ای چرخ دنده ها
11
21 =>24
مانند پیچ بادامک، لولاهای شیار
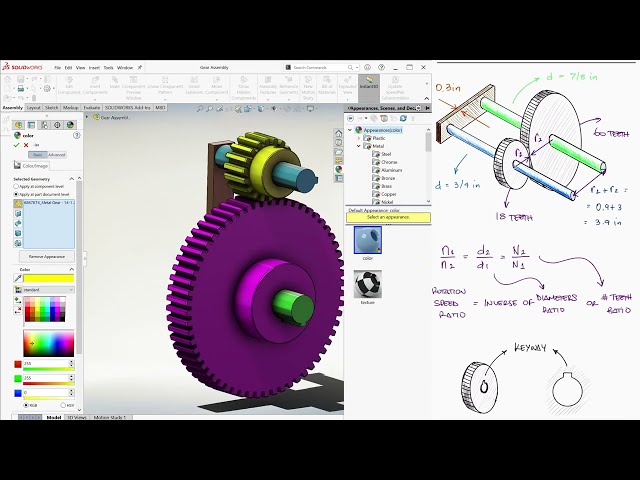
12
24 =>27
و اتصالات جهانی استفاده از مواردی است که به
13
27 =>30
نام جفت مکانیکی در زیر
14
30 =>32
گزینه mate در یک فایل مونتاژ می گویند.
15
32 =>34
16
34 =>37
17
37 =>39
اگر می خواهید
18
39 =>40
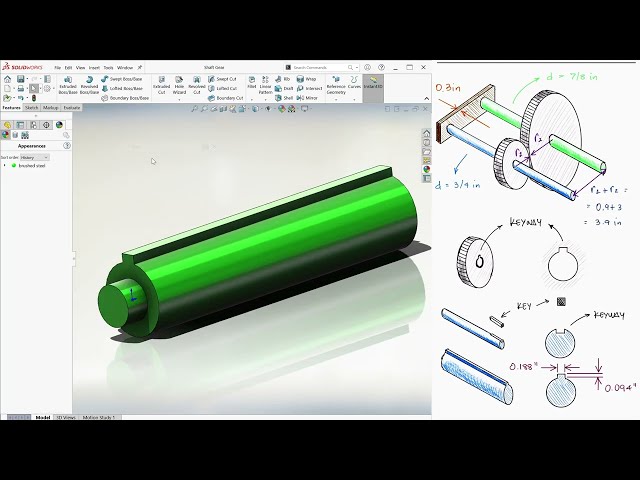
نحوه استفاده از سایر
19
40 =>43
جفت های مکانیکی مانند پیچ یا
20
43 =>45
جفت مکانیکی بادامک یا حتی نحوه استفاده از
21
45 =>48
آنالیز حرکت در مطالعه حرکت
22
48 =>49
را بررسی کنید، حتماً پیوندهای موجود در
23
49 =>51
توضیحات این را بررسی کنید.
24
51 =>53
ویدیو مهمترین مفهومی که
25
53 =>55
در اینجا باید فهمید این است که این جفت های مکانیکی
26
55 =>58
هیچ نوع فیزیک را شبیه سازی نمی کنند
27
58 =>01:00
تماس یا تعامل بین اجسام
28
01:00 =>01:03
آنها فقط یک روش ساده و در عین حال هوشمندانه برای
29
01:03 =>01:04
گفتن به جامدات هستند که وقتی یکی
30
01:04 =>01:07
از اجسام به روش خاصی حرکت می کند،
31
01:07 =>01:09
جسم دیگر در همان جفت باید
32
01:09 =>01:11
واکنش نشان دهد و به روشی خاص حرکت کند،
33
01:11 =>01:14
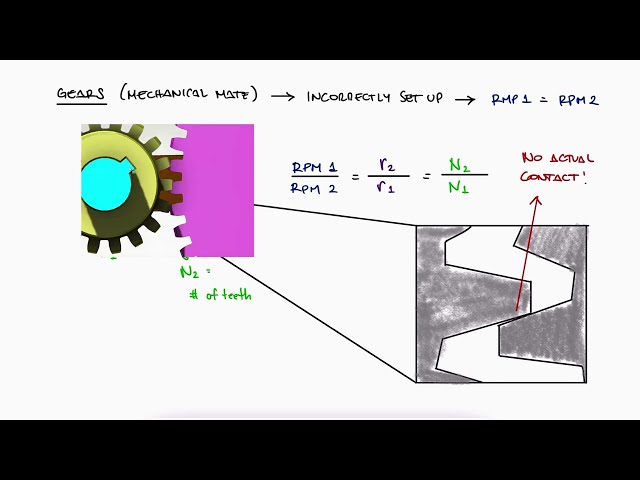
این بدان معنی است که برای مثال
34
01:14 =>01:16
وقتی یک دنده با سرعت خاصی میچرخد،
35
01:16 =>01:18
میتوانیم چرخ دندههای نقلقول-بدون نقل قول را
36
01:18 =>01:20
با سرعتی بچرخانیم که
37
01:20 =>01:23
از روابط دندهها بهصورت ثابت پیروی میکند،
38
01:23 =>01:24
39
01:24 =>01:26
اما همانطور که قبلاً اشاره کردم
40
01:26 =>01:28
solidworks هیچ نوع تماسی را بین سطوح شبیهسازی نمیکند،
41
01:28 =>01:31
بنابراین اگر آن را تنظیم کنید به
42
01:31 =>01:34
اشتباه میتوانید
43
01:34 =>01:36
چرخ دندههای نامناسب را با سرعت یکسانی بچرخانید و در
44
01:36 =>01:38
نتیجه کاملاً به نظر برسید زیرا
45
01:38 =>01:40
دندانها دائماً از
46
01:40 =>01:42
یکدیگر عبور میکنند دندههای جفت شده در
47
01:42 =>01:45
یک جهت میچرخند یا حتی دندههایی دارند که
48
01:45 =>01:47
از نظر فیزیکی به هیچ وجه
49
01:47 =>01:49
به هم متصل نیستند. یک جفت پس بیایید
50
01:49 =>01:51
نگاهی به نحوه ایجاد این جفت بیندازیم،
51
01:51 =>01:52
52
01:52 =>01:54
ابتدا دو چرخ دنده را انتخاب می کنم که
53
01:54 =>01:56
گام قطری یکسانی دارند تا
54
01:56 =>01:58
آنها در واقع به خوبی با هم کار می کنند و
55
01:58 =>02:01
هیچ تداخلی ندارند، باید
56
02:01 =>02:03
با
57
02:03 =>02:06
تعداد گام قطری دندانه ها و
58
02:06 =>02:08
سایر اصطلاحات مربوط به پارامترهای چرخ دنده کاملاً آشنا باشید،
59
02:08