در این مطلب، ویدئو حل معکوس سینماتیک ربات ها در متلب با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:20:34
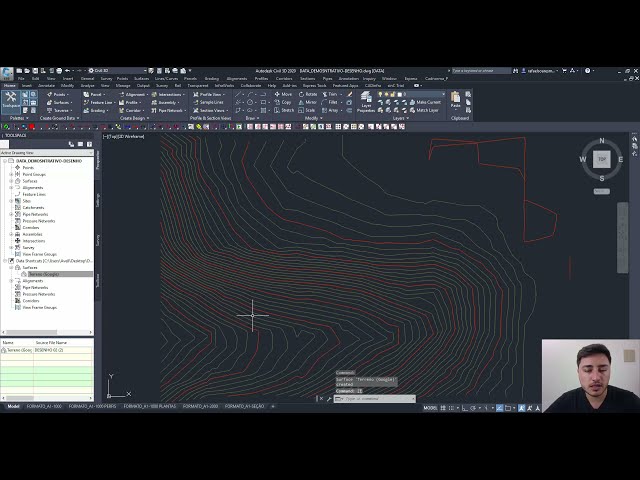
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
03 =>05
سلام به همه در این ویدیو من به
2
05 =>07
شما توضیح خواهم داد که چگونه یک مسئله
3
07 =>09
4
09 =>12
سینماتیک معکوس یک سیستم رباتیک را در متلب حل
5
12 =>15
کنید، مثالی که در نظر خواهیم گرفت
6
15 =>17
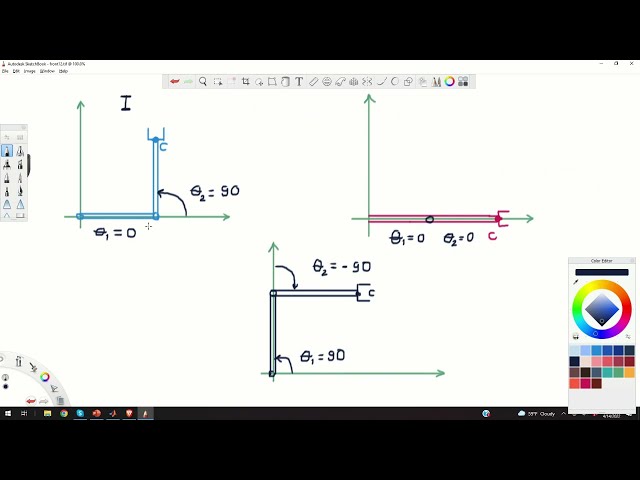
در اینجا آورده شده است.
7
17 =>18
این
8
18 =>21
شکل یک سیستم رباتیک با دو
9
21 =>22
درجه آزادی را نشان
10
22 =>24
11
24 =>27
می دهد. و تتا
12
27 =>29
دو هدف
13
29 =>30
14
30 =>32
15
32 =>34
2 است
16
34 =>35
اگر
17
35 =>38
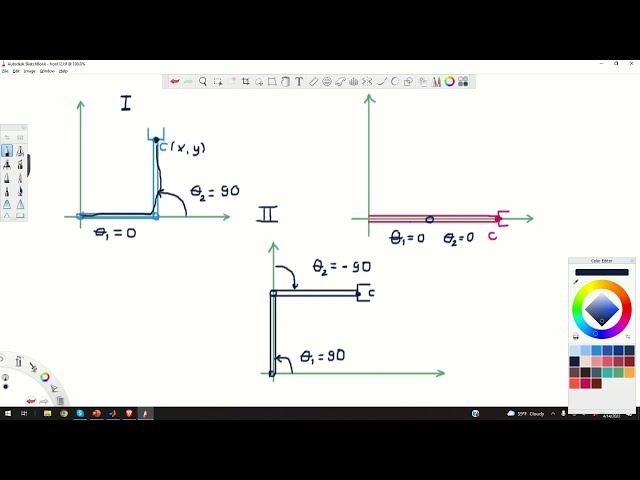
مختصات نقطه مرکز ابزار
18
38 =>39
19
39 =>42
c را
20
43 =>45
قبل از شروع به ما داده شود، زوایای تاتا 1 و تتا 2 را محاسبه کنید، باید
21
45 =>47
موارد زیر را ذکر کنم.
22
47 =>48
23
48 =>52
ویدیوها،
24
52 =>55
بنابراین اگر ویدیوهایی را که میسازم دوست دارید،
25
55 =>58
لطفاً عضو شوید یا دکمه لایک را
26
58 =>59
فشار دهید،
27
59 =>01:02
28
01:02 =>01:05
با استفاده از
29
01:05 =>01:08
قوانین مثلثاتی و قوانین اولیه، میتوانید
30
01:08 =>01:11
مختصات x و y را به زوایایی
31
01:11 =>01:13
که 1 tera2 هستند مرتبط
32
01:13 =>01:16
کنید، معادله شبیه به آن خواهد بود.
33
01:16 =>01:17
اگر میخواهید در مورد نحوه
34
01:17 =>01:19
استخراج
35
01:19 =>01:21
این دو معادله بیشتر بدانید، میتوانید ویدیوی قبلی من را تماشا
36
01:21 =>01:24
کنید و میتوانید
37
01:24 =>01:26
آموزشی که من ساختهام را بخوانید که در
38
01:26 =>01:27
اینجا
39
01:27 =>01:29
در این بخش ارائه شده است. آموزش icular من
40
01:29 =>01:32
توضیح دادم که چگونه این دو
41
01:32 =>01:34
معادله را استخراج کنیم و چگونه آنها را به
42
01:34 =>01:36
صورت تحلیلی برای tata 2
43
01:36 =>01:37
و
44
01:37 =>01:40
tera1 حل کنیم.
45
01:40 =>01:42
46
01:42 =>01:43
47
01:43 =>01:45
48
01:45 =>01:46
49
01:46 =>01:48
50
01:48 =>01:51
راهحلهای تحلیلی
51
01:51 =>01:54
برای مسئله سینماتیک معکوس استخراج کنید، لطفاً
52
01:54 =>01:54
53
01:54 =>01:56
ویدیوی قبلی را تماشا کنید و این سخنرانی را بخوانید،
54
01:56 =>01:58
55
01:58 =>02:00
لینکهایی در توضیح
56
02:00 =>02:02
زیر ارائه میشوند، بنابراین اجازه دهید
57
02:02 =>02:04
به مسئله اصلی خود برگردیم،
58
02:04 =>02:06
بنابراین این دو معادله را داریم که
59
02:06 =>02:08
60
02:08 =>02:09
x و y را
61
02:09 =>02:11
با زوایای تتا یک و تتا مرتبط میکنند. دو
62
02:11 =>02:15
من میخواهم این دو معادله را
63
02:15 =>02:17
برای این مورد خاص حل کنیم، میتوانیم آن را به صورت تحلیلی حل کنیم
64
02:17 =>02:19
65
02:19 =>02:20
و این در ویدیوی قبلی توضیح داده شده است،
66
02:20 =>02:22
اما
67
02:22 =>02:25
برای موارد پیچیدهتر و برای
68
02:25 =>02:27
س





![فیلم آموزشی: بهترین راه برای درج BLUEPRINT/IMAGE | مدل پهپاد سالیدورکس [بخش اول] با زیرنویس فارسی](http://pezhvak24.ir/dl/wood/_NoetH0RM5oimage2.jpg)