در این مطلب، ویدئو راهاندازی حلکننده در ANSYS Fluent برای تجزیه و تحلیل آیرودینامیکی یک خودروی خورشیدی – قسمت 3 با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:06:49
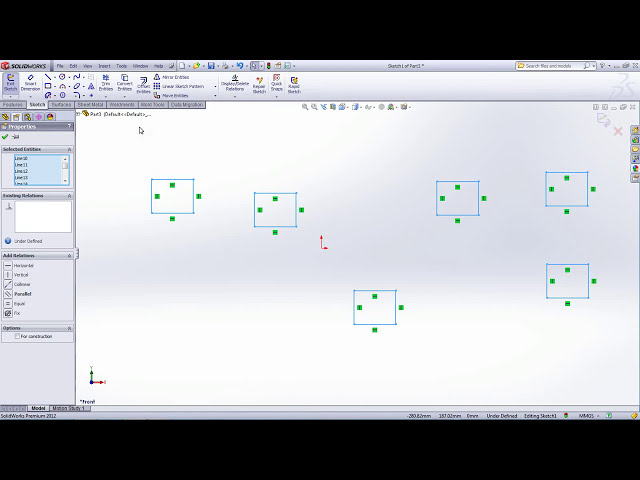
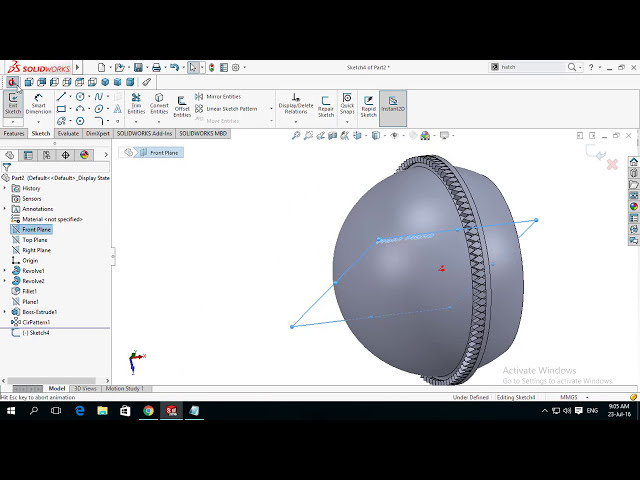
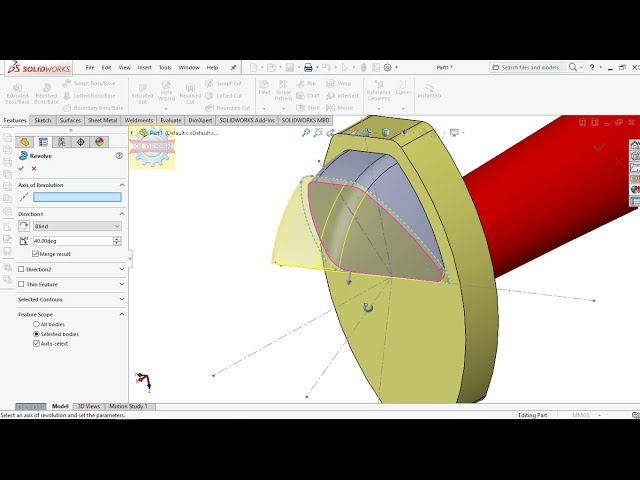
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
02 =>06
در این ویدیو شما تنظیمات حل کننده
2
06 =>08
مورد نیاز برای انجام
3
08 =>11
آیرودینامیک خارجی خودروی خورشیدی را یاد
4
11 =>12
خواهید گرفت، ابتدا حالت پایدار را اجرا می کنیم
5
12 =>15
و مواد را شرایط مرزی
6
15 =>16
7
16 =>19
را تعیین می کنیم و مدل تلاطم را فعال می کنیم سپس نمودار گزارش را
8
19 =>20
با استفاده از کیس تنظیم می کنیم و محاسبات را اجرا کنید
9
20 =>22
تا زمانی که راه حل
10
22 =>25
11
29 =>32
همگرا شود، مدل تلاطم
12
32 =>34
مدل viscus را تنظیم کنید، بیایید مدل آشفتگی K Omega را اعمال کنیم
13
34 =>37
و Gekko را
14
41 =>44
در زیر مواد فعال کنیم، بیایید بررسی کنیم که آیا
15
44 =>47
هوا به عنوان گزینه پیش فرض اختصاص داده شده است،
16
47 =>49
انتخاب نام به طور خودکار
17
49 =>50
شرایط مرزی را به آنها اختصاص می دهد
18
50 =>52
که می تواند
19
52 =>57
سرعت ورودی 27.78 متر بر ثانیه که
20
57 =>01:01
به 100 کیلومتر بر ساعت
21
01:05 =>01:07
تبدیل می شود، باید مطمئن شویم که خروجی روی فشار گیج صفر تنظیم شده است، به
22
01:07 =>01:10
این دلیل است که
23
01:10 =>01:13
خروجی در معرض جو قرار دارد،
24
01:14 =>01:16
اجازه دهید زمین و نوع منطقه آسمان را
25
01:16 =>01:19
به دیواری
26
01:23 =>01:25
27
01:26 =>01:29
برای جلو تغییر دهیم و چرخ عقب بیایید
28
01:29 =>01:32
29
01:37 =>01:40
ورودی دیوار متحرک چرخشی را فعال کنیم مبدا محور چرخش همانطور که
30
01:40 =>01:42
روی
31
01:43 =>01:45
صفحه نشان داده شده است دره در تصویر نشان داده شده است صفحه نمایش e را می توان
32
01:45 =>01:49
از فضا استخراج کرد و ادعا می کند
33
01:50 =>01:52
سرعت 100 4.83 راد در
34
01:52 =>01:54
ثانیه است که سرعت ورودی شما تقسیم
35
01:54 =>01:57
بر شعاع چرخ است که محور
36
01:57 =>01:59
چرخش در جهت Z است طبق
37
01:59 =>02:02
قانون سمت راست
38
02:03 =>02:07
فیرینگ بدون لغزش است. دیوار ثابت
39
02:08 =>02:09
تنظیمات چرخ عقب را برای
40
02:09 =>02:11
چرخ جلو دریافت می کند، اما ورودی مبدا
41
02:11 =>02:14
چرخش همانطور که نشان داده شده است،
42
02:18 =>02:22
ما یک زمین متحرک با سرعت 27.78 متر
43
02:22 =>02:24
در ثانیه در جهت x
44
02:24 =>02:27
در زندگی واقعی داریم، اما
45
02:27 =>02:29
در شبیه سازی هر چیز دیگری حرکت خواهد کرد.
46
02:29 =>02:32
نسبت به
47
02:36 =>02:38
خودرو در حال حرکت باشید، آسمان با
48
02:38 =>02:41
سرعت زمین برابر است، بنابراین 27.78 متر بر ثانیه در
49
02:41 =>02:44
جهت x،
50
02:45 =>02:46
شعاع چرخ ها با
51
02:46 =>02:49
همان سرعت زمین حرکت می کنند
52
02:52 =>02:57
، مقادیر مرجع را همانطور که به شما نشان داده شده است به روز
53
03:00 =>03:02
کنید
54
03:04 =>03:07
و بالابر و بکشید. ضریب
55
03:07 =>03:09
فیرینگ و چرخ های برجسته طرح
56
03:09 =>03:12
و چاپ به
57
03:16 =>03:18
شما
58
03:24 =>03:28
اجازه دهید آن را مقداردهی اولیه
59
03:29 =>03:31
60
03:32