در این مطلب، ویدئو سخنرانی 24: مدل های متلب برای کنترلرهای دیجیتال با استفاده از معادلات تفاوت با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:30:06
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
00 =>25
[Music] به
2
25 =>28
بازگشت خوش آمدید، بنابراین در این سخنرانی
3
28 =>30
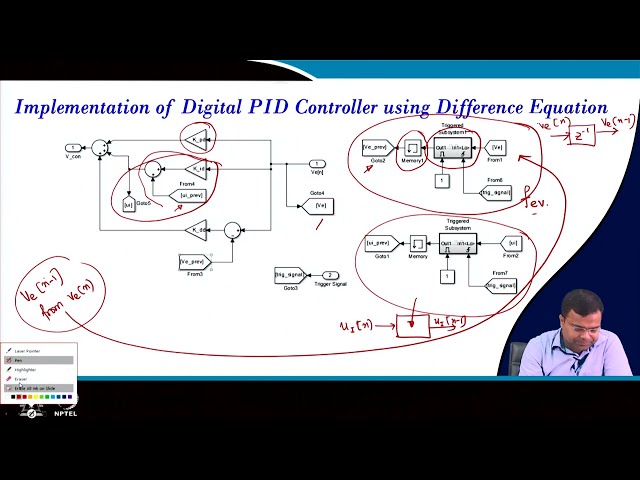
ما قصد داریم در مورد توسعه مدل متلب
4
30 =>32
برای کنترلر دیجیتال با استفاده از
5
32 =>34
معادلات تفاوت صحبت کنیم،
6
34 =>36
بنابراین در این کلاس می خواهیم در
7
36 =>38
مورد توسعه گام به گام مدل متلب سفارشی
8
38 =>41
برای کنترلر
9
41 =>43
دیجیتال و سپس اجرای کنترل دیجیتال صحبت کنیم. با استفاده از
10
43 =>44
معادله اختلاف
11
44 =>46
و مدل matlab برای کنترل مد ولتاژ دیجیتال،
12
46 =>47
13
47 =>50
بنابراین در واقع این
14
50 =>52
ادامه سخنرانی قبلی است که در آن معماری کنترل
15
52 =>54
حالت ولتاژ دیجیتال را در نظر
16
54 =>56
17
56 =>58
گرفتیم و کاری که در سخنرانی قبلی انجام
18
58 =>01:00
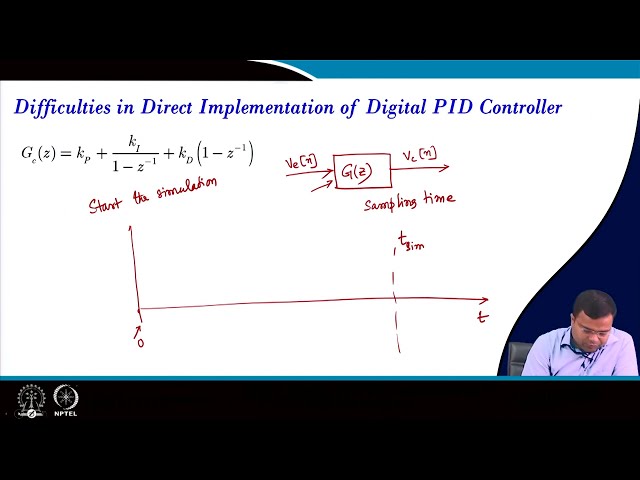
دادیم، یک کنترل کننده دیجیتال pid را در نظر گرفتیم که در
19
01:00 =>01:02
آن
20
01:02 =>01:04
این کنترل کننده pid که ما در واقع در
21
01:04 =>01:07
نظر گرفتیم این همان کنترل کننده pid است
22
01:07 =>01:09
بنابراین
23
01:09 =>01:10
در این کنترل کننده pid آنچه را در
24
01:10 =>01:12
نظر گرفتیم یعنی
25
01:12 =>01:17
این g از z ah متأسفانه g c از z
26
01:17 =>01:19
ما کنترل تناسبی را
27
01:19 =>01:21
به
28
01:21 =>01:25
اضافه کنترل انتگرال در نظر گرفتیم سپس
29
01:25 =>01:28
1 در 1 منهای z معکوس 1 در 1 منهای z
30
01:28 =>01:31
معکوس به
31
01:31 =>01:32
اضافه کنترل مشتق
32
01:32 =>01:33
1
33
01:33 =>01:35
منهای
34
01:35 =>01:36
z معکوس
35
01:36 =>01:39
بنابراین ما مستقیماً t را وصل کرده ایم hat
36
01:39 =>01:42
یعنی یک بلوک از
37
01:42 =>01:43
سیمولینک
38
01:43 =>01:45
و بلاک دامنه z در نظر گرفته ایم و به سادگی
39
01:45 =>01:47
این مقادیر
40
01:47 =>01:49
k p k i و k d را وصل
41
01:49 =>01:51
کرده ایم و
42
01:51 =>01:53
این تابع انتقال را نیز بر حسب
43
01:53 =>01:55
چند جمله ای z
44
01:55 =>01:56
ok نوشته ایم
45
01:56 =>01:58
حالا در این دوره
46
01:58 =>02:00
در این کلاس آنچه داریم. برای انجام این کار باید
47
02:00 =>02:02
این را در معادله تفاضل بنویسیم
48
02:02 =>02:04
و میخواهیم بپرسیم که چرا باید
49
02:04 =>02:08
همان کنترلکننده pid را انجام دهیم،
50
02:08 =>02:10
بنابراین این قسمت کنترلکننده
51
02:10 =>02:12
تناسبی بخش تناسبی از کنترلکننده pid است،
52
02:12 =>02:13
53
02:13 =>02:16
بنابراین مانند این است که شما میدانید
54
02:16 =>02:19
کنترلر دیجیتال pid کنترل کننده
55
02:19 =>02:23
pid
56
02:25 =>02:29
در اینجا این قسمت عبارت تناسبی است
57
02:29 =>02:33
بنابراین این واحد متناسب
58
02:34 =>02:39
است بنابراین
59
02:39 =>02:42
این قسمت وان تناسبی است
60
02:42 =>02:44
61
02:45 =>02:47
سپس این قسمت
62
02:47 =>02:49
63
02:49 =>02:51
جزء جدایی ناپذیر قسمت
64
02:51 =>02:54
جدایی ناپذیر است
65
0

![فیلم آموزشی: 509 - انسیس ماکسول | ظرفیت خازنی صفحه ای الکترواستاتیک [2/3] با زیرنویس فارسی](http://pezhvak24.ir/dl/wood/MDI-ByIDlkoimage2.jpg)