در این مطلب، ویدئو سخنرانی 26: توسعه مدل MATLAB برای کنترل حالت جریان سیگنال مختلط با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:10:01
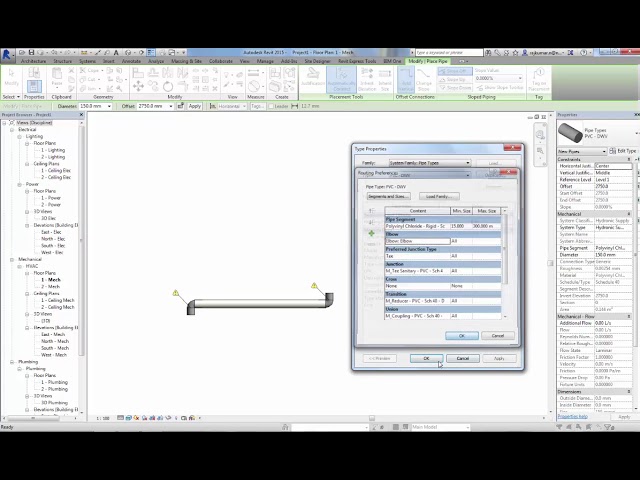
تصاویر این ویدئو:



قسمتی از زیرنویس این فیلم:
00 =>25
[موسیقی]
2
25 =>27
خوش آمدید بنابراین در این سخنرانی قصد
3
27 =>29
داریم در مورد توسعه مدل matlab
4
29 =>31
برای کنترل حالت جریان سیگنال مختلط
5
31 =>33
صحبت کنیم، بنابراین ابتدا در مورد
6
33 =>35
توسعه مدل matlab سفارشی صحبت
7
35 =>37
خواهیم کرد و سپس چند
8
37 =>39
مطالعه موردی شبیه سازی انجام خواهیم داد،
9
39 =>40
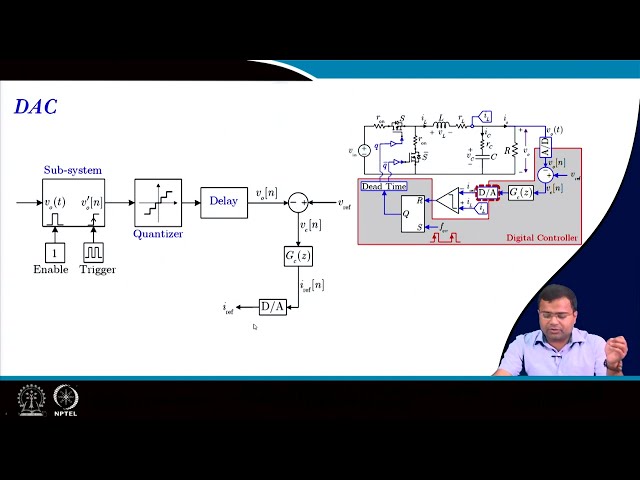
بنابراین این معماری است که ما داریم.
10
40 =>43
در هفته قبل که می دانید به تفصیل مورد بحث قرار گرفت
11
43 =>44
12
44 =>47
و ما از این
13
47 =>49
معماری کنترل سیگنال مختلط شناخته شده شروع می کنیم
14
49 =>52
که در آن حلقه جریان به صورت آنالوگ است
15
52 =>53
و سپس یک حلقه ولتاژ دارید
16
53 =>55
که به صورت دیجیتال است،
17
55 =>57
بنابراین ابتدا باید
18
57 =>58
شکل موج را
19
58 =>59
در اینجا درک کنیم.
20
59 =>01:00
در اینجا
21
01:00 =>01:04
می دانیم که اگر نمونه را از اینجا
22
01:04 =>01:06
بگیریم و بدانیم که برای تبدیل و محاسبه نیاز به زمان دارد
23
01:06 =>01:08
24
01:08 =>01:10
و سپس جریان اوج آماده خواهد شد
25
01:10 =>01:12
و آن زمان در واقع فرآیند سوئیچینگ را آغاز می
26
01:12 =>01:13
کند، یعنی
27
01:13 =>01:15
ساعت سوئیچینگ و ساعت نمونه برداری
28
01:15 =>01:16
وجود دارد. یک تأخیر
29
01:16 =>01:18
و برای پیاده سازی آن که
30
01:18 =>01:21
فهمیدیم به ویژه این
31
01:21 =>01:23
جبران کننده کنترل ساعت
32
01:23 =>01:25
باید هماهنگ شود، نباید ب e یک
33
01:25 =>01:27
تابع انتقال ساده است، بنابراین ما باید از یک
34
01:27 =>01:29
معادله تفاوت استفاده کنیم و آن را
35
01:29 =>01:32
در دو کلاس قبلی مورد بحث قرار
36
01:32 =>01:34
دادیم، بسیار خوب است، بنابراین می خواهیم از همان رویکرد استفاده کنیم،
37
01:34 =>01:36
اما اکنون در این مورد از یک
38
01:36 =>01:38
کنترل کننده pi به جای کنترل کننده pid استفاده می کنیم،
39
01:38 =>01:41
زیرا این یک کنترل حالت فعلی
40
01:41 =>01:43
و ما باید این را پیاده سازی
41
01:43 =>01:46
کنیم اکنون مبدل a به d خواهیم
42
01:46 =>01:48
داشت و قبلاً در مورد
43
01:48 =>01:50
پیاده سازی مبدل a به d
44
01:50 =>01:53
که یک بلوک کوانتایزر است بحث کرده ایم و سپس می دانید
45
01:53 =>01:56
بلوک نمونه برداری بلوک نمونه برداری این است که ما
46
01:56 =>01:58
می توانیم نمونه برداری حتی ماشه ای انجام دهیم. که
47
01:58 =>01:59
قبلاً در مورد آن بحث کردیم،
48
01:59 =>02:02
میتوانید از یک بلوک کوانتایزر استفاده کنید و
49
02:02 =>02:04
ما میتوانیم یک تأخیر اضافه کنیم
50
02:04 =>02:06
تا حتی نمونههای ماشهای باشند.
51
02:06 =>02:10
52
02:12 =>02:15
53
02:15 =>02:17
54
02:17 =>02:19
55
02:19 =>02:20
ایجاد
56
02:20 =>02:23
یک تقریباً حتی در
57
02:23 =>02:25
آن صورت ما میتوانیم ولتاژ خطا را ایجاد کنیم،
58
02:25 =>02:27
59
02:27 =>02:29
بنابراین بعد از این بلوک بلوک تاخیری
60
02:29 =>02:31
به