در این مطلب، ویدئو شبیه سازی زاویه اویلر با متلب | ادغام معادلات دیفرانسیل سینماتیک چرخشی با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:43:30
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>02
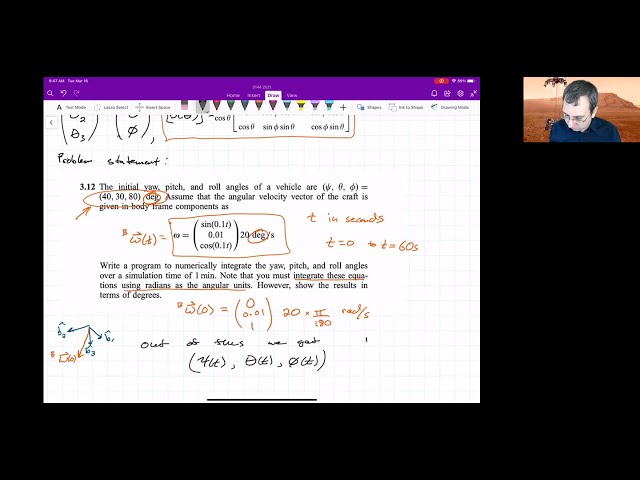
ما می خواهیم معادلات دیفرانسیل سینماتیکی را بررسی
2
02 =>03
کنیم
3
03 =>05
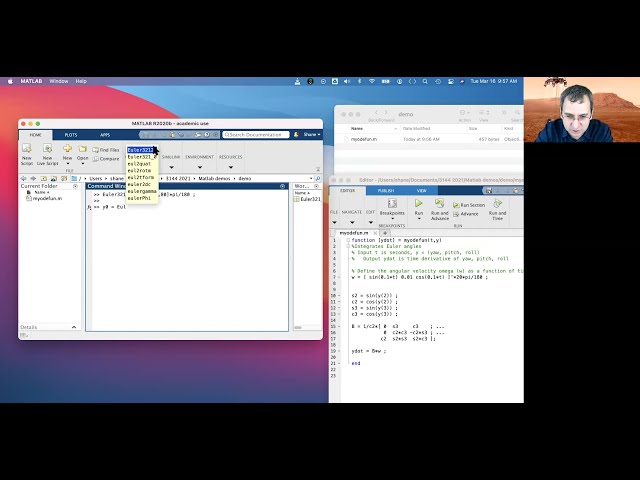
و آنها را با استفاده از matlab شبیه سازی کنیم،
4
05 =>06
بنابراین یک
5
06 =>09
آموزش matlab در مورد این
6
09 =>10
معادلات دیفرانسیل سینماتیکی بسیار صحبت شده است، اما ما
7
10 =>12
هنوز آنها را ادغام نکرده
8
12 =>14
ایم، بنابراین آنها را شبیه سازی نکرده ایم.
9
14 =>16
ما قصد داریم این معادلات دیفرانسیل سینماتیک چرخشی را شبیه سازی
10
16 =>19
11
19 =>22
کنیم
12
22 =>24
و من شما را با استفاده از
13
24 =>25
matlab راهنمایی می کنم،
14
25 =>28
اما اگر پایتون را ترجیح می دهید و می توانید
15
28 =>29
آن را بفهمید
16
29 =>31
که عالی است، فکر می کنم mathematica نیز می
17
31 =>32
تواند این کار را انجام دهد،
18
32 =>35
اما من هستم فقط در مورد matlab صحبت می
19
35 =>36
20
36 =>38
کنم و من از یک ماتریس استفاده می کنم و متلب است
21
38 =>40
زیرا بر اساس ماتریس ها است،
22
40 =>41
بنابراین ما می توانیم این کار را به خوبی انجام دهیم
23
41 =>43
، یعنی اولین مورد وجود دارد و من قصد ندارم
24
43 =>45
این را شبیه سازی کنم،
25
45 =>47
اما شما در واقع می توانید
26
47 =>49
جهت کسینوس را بگیرید. ماتریس
27
49 =>52
به یاد داشته باشید که چه کاری انجام می دهد، نشان دهنده
28
52 =>54
نحوه جهت گیری
29
54 =>58
بدن صلب شما
30
58 =>01:00
یا به ویژه نحوه جهت گیری یک قاب متصل به
31
01:00 =>01:02
بدنه صلب شما
32
01:02 =>01:06
با توجه به
33
01:06 =>01:09
برخی جهات اینرسی است،
34
01:09 =>01:12
بنابراین این ماتریس ما اگر از
35
01:12 =>01:13
36
01:13 =>01:16
برچسب گذاری قاب صریح uh استفاده کنیم، فریم b را
37
01:16 =>01:18
به قاب انتهایی مرتبط میکند، بنابراین
38
01:18 =>01:20
کتاب آن را به این ترتیب مینویسد، بنابراین این یک
39
01:20 =>01:23
40
01:23 =>01:24
41
01:24 =>01:27
42
01:27 =>01:28
است. با تغییر در زمان،
43
01:28 =>01:32
آن را به آن ماتریس tilde تبدیل میکنید، به
44
01:32 =>01:34
طوری که یکی از راههای شبیهسازی
45
01:34 =>01:36
روش دیگری است که در مورد آن صحبت کردیم استفاده از
46
01:36 =>01:38
زوایای اویلر است و ما در مورد 12
47
01:38 =>01:40
مجموعه از زاویههای اویلر صحبت کردهایم،
48
01:40 =>01:43
اگر از زوایای اویلر استفاده کنید، به این معنی است که
49
01:43 =>01:44
شما
50
01:44 =>01:48
یک بردار زاویه داریم
51
01:48 =>01:51
و ماتریس c را می توان بر حسب آن زوایا بازنویسی کرد، به
52
01:51 =>01:54
این
53
01:54 =>01:56
معنی که ماتریس کسینوس جهت را دریافت می کنید که
54
01:56 =>01:58
هر کدام از ورودی ها
55
01:58 =>01:59
56
01:59 =>02:02
تابعی از این سه زاویه هستند
57
02:02 =>02:05
و معادله دیفرانسیل سینماتیکی
58
02:05 =>02:06
شبیه نقطه تتا به نظر می رسد.
59
02:06 =>02:10
بردار ستونی
60
02:10 =>02:14
مقداری