در این مطلب، ویدئو طراحی کنترل موتور با MATLAB و Simulink با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:28:46
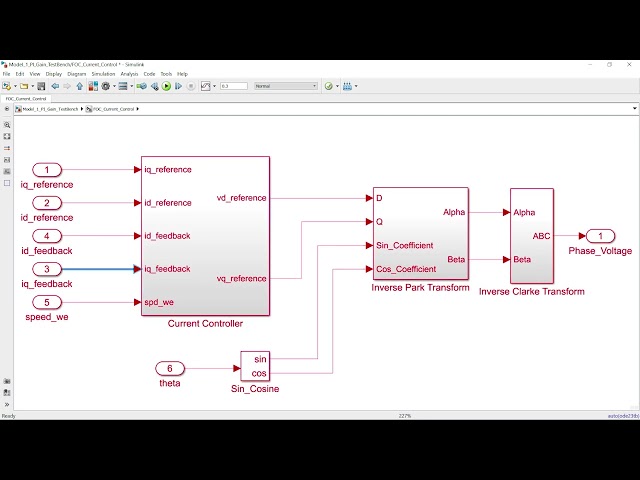
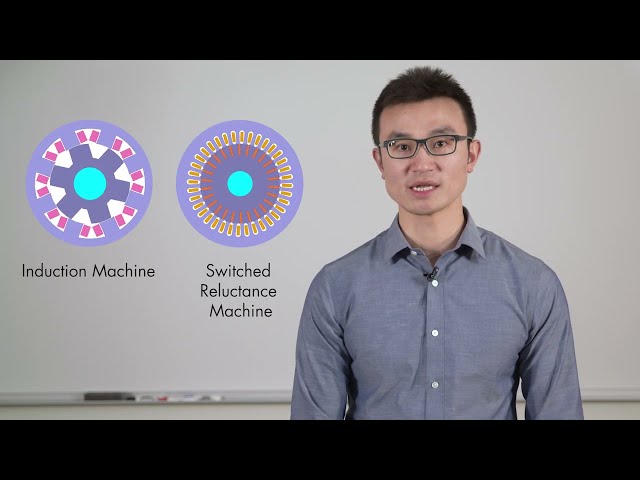
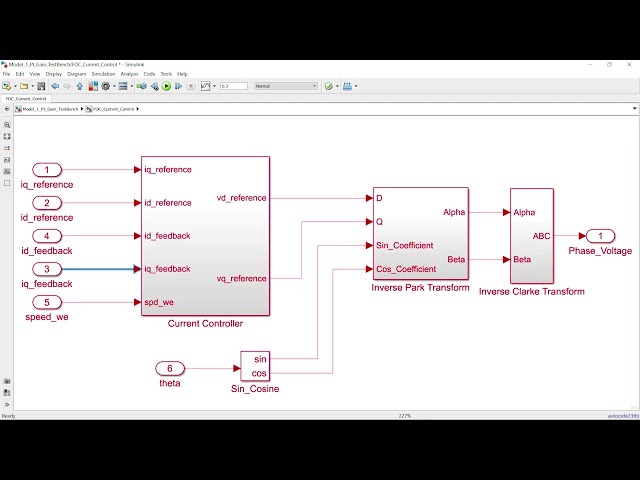
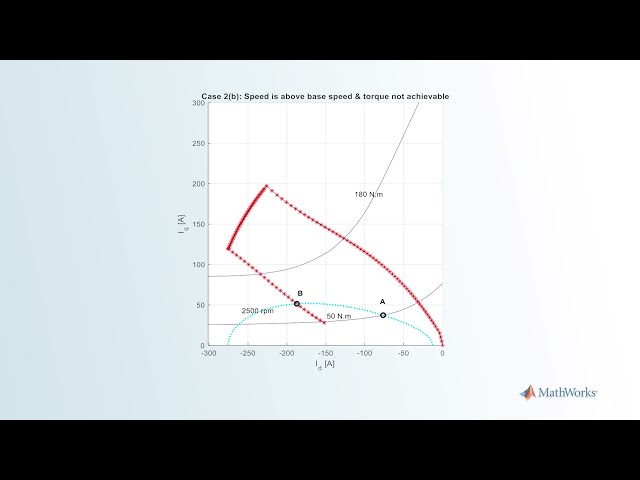
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>10
[موسیقی] به
2
10 =>12
همه خوش آمدید
3
12 =>14
نام من دکای هو است و من بخشی از
4
14 =>17
تیم مهندسی نرم افزار ریاضیات
5
17 =>19
هستم شغل من در ریاضیات بیشتر بر
6
19 =>21
روی پشتیبانی از مهندسان کنترل موتور و قدرت
7
21 =>23
در صنعت خودرو متمرکز است تا
8
23 =>26
طراحی مبتنی بر مدل را
9
26 =>28
در این ویدیو اتخاذ کنند. قصد داریم چند
10
28 =>30
نمونه صنعتی را برای طراحی کنترل موتور
11
30 =>32
با استفاده از کنترل موتور matlab و simulink به شما نشان دهیم،
12
32 =>35
موضوع بسیار مهمی
13
35 =>38
برای الکتریکی سازی حمل و نقل است که
14
38 =>40
معمولاً در وسایل نقلیه الکتریکی یا هیبریدی الکتریکی
15
40 =>43
، سیستم محرک موتور
16
43 =>45
از سه بخش
17
45 =>46
موتورهای
18
46 =>49
پلی الکترونیکی تشکیل شده است و کنترلها
19
49 =>52
در حال حاضر در سال
20
52 =>54
2018 اکثر موتورهای انقباض V
21
54 =>57
22
57 =>58
23
58 =>01:00
به دلیل بازده و
24
01:00 =>01:02
چگالی توان بالا
25
01:02 =>01:04
و همچنین توانایی حفظ
26
01:04 =>01:07
توان ثابت در محدوده وسیع سرعت، ماشینهای سنکرون مغناطیسی دائم یا PMSM هستند، از
27
01:07 =>01:09
سوی دیگر، شاهد
28
01:09 =>01:11
حضور روزافزون ماشینهای القایی هستیم.
29
01:11 =>01:13
و ماشین های رلوکتانس سوئیچ
30
01:13 =>01:15
به عنوان موتورهای کششی
31
01:15 =>01:19
که هر کدام مزایای منحصر به فرد خود را دارند
32
01:19 =>01:21
در این ویدئو ما بر روی
33
01:21 =>01:24
کنترل pmm تمرکز خواهیم کرد،
34
01:24 =>01:26
اما برخی از ابزارها و تکنیکهای
35
01:26 =>01:29
مورد بحث در اینجا برای
36
01:29 =>01:31
انواع دیگر ماشینها و
37
01:31 =>01:34
همچنین موضوعات اصلی کنترل برای pmm
38
01:34 =>01:35
که در طول این ویدئو به آنها میپردازم،
39
01:35 =>01:36
شامل
40
01:36 =>01:38
41
01:38 =>01:41
تنظیم خودکار کنترل میدانگرا پی میشود. کنترل کننده
42
01:41 =>01:43
کنترل جداسازی پویا و کنترل تضعیف شار را به
43
01:43 =>01:45
دست
44
01:45 =>01:47
می آورد رویکرد کلی که من در این ویدیو از آن استفاده خواهم کرد
45
01:47 =>01:49
این است
46
01:49 =>01:51
که ابتدا مفهوم را معرفی می کنم
47
01:51 =>01:53
و سپس شما را از طریق یک
48
01:53 =>01:54
مدل شبیه لینک که مفهوم را نشان می دهد راهنمایی می کنم
49
01:54 =>01:56
تا شما یک نتیجه را دریافت کنید.
50
01:56 =>01:58
درک دقیقی از نحوه
51
01:58 =>02:01
پیاده سازی این مفاهیم در صنعت
52
02:01 =>02:03
برای شروع، ما می خواهیم به
53
02:03 =>02:06
اساسی ترین مفهوم در کنترل pmsm نگاه کنیم
54
02:06 =>02:08
که کنترل میدان گرا است
55
02:08 =>02:11
یا
56
02:11 =>02:14
مهندسان کانونی که کنترل کننده ها را برای موتورهای PMSM طراحی
57
02:14 =>02:15
58
02:15 =>02:17
می کنند معمولاً برای ارائه
59
02:17 =>02:20
ساختار اصلی کنترل کننده به کنترل کانون متکی هستند. به طوری که
60
02:20 =>02