در این مطلب، ویدئو فدریکو رندا – SoRoSim: جعبه ابزار MATLAB برای مدل سازی ربات های نرم با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 1:33:17
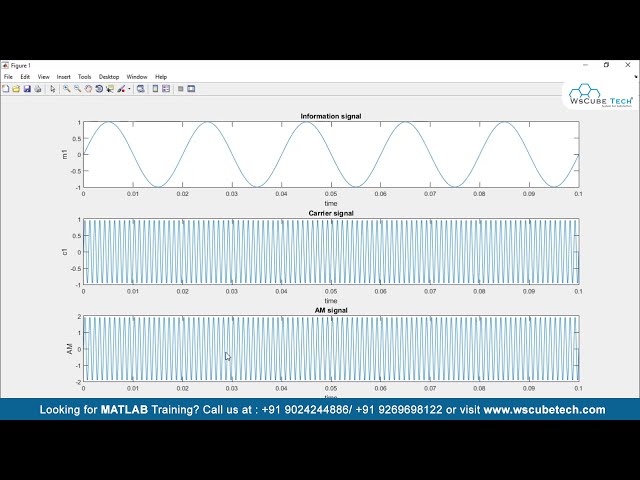
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
00 =>02
برای
2
02 =>04
جلسه بعدازظهر
3
04 =>06
ما دو کارگاه در واقع امروز
4
06 =>09
بعد از ظهر توسط فدریکو راندا بوقلمون
5
09 =>12
و توسط دکتر حبی ساداتی داریم
6
12 =>15
و قبل از معرفی اولین سخنران،
7
15 =>18
فقط اجازه دهید
8
18 =>19
برخی از
9
19 =>21
قوانین خانه داری را
10
21 =>23
11
23 =>25
یادآوری کنم، بنابراین به شما یادآوری می کنم که دوربین و میکروفون خود
12
25 =>27
را
13
27 =>29
در طول سخنرانی خاموش نگه دارید. حداقل برای
14
29 =>31
بخش تئوری،
15
31 =>33
اگر سؤالی
16
33 =>36
دارید، میتوانید آنها را در
17
36 =>37
ابزار چت بنویسید
18
37 =>41
یا در هر صورت، ما
19
41 =>43
در پایان جلسات برای برخی
20
43 =>46
سؤالات و پاسخها زمان خواهیم داشت،
21
46 =>47
بنابراین خوب، بیایید
22
47 =>50
اولین سخنران را معرفی
23
50 =>53
کنیم. برای من خوشحالم که دکتر فدریکو را معرفی
24
53 =>56
25
56 =>58
26
58 =>01:00
کنم و درباره سوابقش درباره او صحبت
27
01:00 =>01:03
کنم.
28
01:03 =>01:05
29
01:05 =>01:08
30
01:08 =>01:10
31
01:10 =>01:12
32
01:12 =>01:15
33
01:15 =>01:17
در سال 2014 مدرک دکترای خود را دریافت کرد
34
01:17 =>01:19
.
35
01:19 =>01:20
سپس
36
01:20 =>01:24
فدریکوندا به آزمایشگاه در mit
37
01:24 =>01:27
atlantique و آزمایشگاه یخ زدایی پیوست در ریاض
38
01:27 =>01:30
به عنوان استاد مدعو در سال 2018
39
01:30 =>01:33
به ترتیب در
40
01:33 =>01:35
سال 2019 به عنوان دانشیار ویراستار
41
01:35 =>01:38
در چندین مجله معتبر مانند
42
01:38 =>01:40
رباتیک نرم و روباتیک سه پایه بالا
43
01:40 =>01:43
و حروف اتوماسیون فعالیت می کند و علایق تحقیقاتی وی
44
01:43 =>01:46
شامل مدل سازی دینامیکی و
45
01:46 =>01:49
کنترل ربات های نرم و زیر آب
46
01:49 =>01:53
با استفاده از اصول و مکانیک هندسی است.
47
01:53 =>01:57
و امروز این کارگاه در مورد
48
01:57 =>02:00
سوروس در جعبه ابزار متلب برای
49
02:00 =>02:04
مدلسازی ربات های نرم است پس
50
02:05 =>02:07
سلام به همه عصر
51
02:07 =>02:10
بخیر صبح بخیر عصر بخیر متشکرم متئو
52
02:10 =>02:12
برای معرفی بسیار خوشحالم
53
02:12 =>02:15
که توسط متئو معرفی شدم دوست بسیار خوب
54
02:15 =>02:18
همکارم در واقع او آنجا بود
55
02:18 =>02:21
در ابتدای این سفر
56
02:21 =>02:22
خوب است
57
02:22 =>02:26
، فکر می کنم شما می توانید صفحه نمایش من را درست ببینید
58
02:26 =>02:29
بله، ما می توانیم بله در حالت تمام صفحه، اکنون
59
02:29 =>02:32
کاملاً
60
02:32 =>02:34
خوب است،
61
02:34 =>02:36
بنابراین بیایید این
62
02:36 =>02:39
توضیحات را درباره
63
02:39 =>02:40
جعبه ابزار sorosim matlab
64
02:40 =>02:43
با من شروع کنیم امروز annu matthew و
65
02:43 =>02:46
e-class ben meda وجود دارد. از
66
00