در این مطلب، ویدئو نحوه طراحی ربات مفصلی (RRR) در متلب 2021 | RST | SimScape با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:17:50
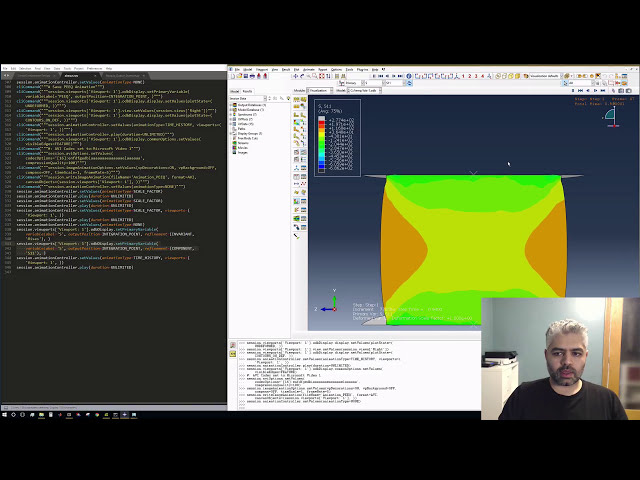
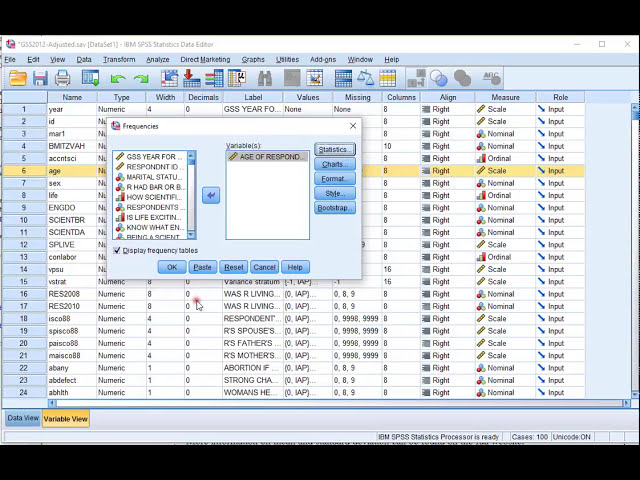
تصاویر این ویدئو:



قسمتی از زیرنویس این فیلم:
00 =>08
[موسیقی]
2
08 =>09
زبان آموزان عزیز امیدوارم
3
09 =>11
پس از دریافت تعدادی
4
11 =>13
درخواست از منابع مختلف در مورد
5
13 =>15
ساختن ویدیویی در مورد مدل سازی
6
15 =>16
مانیپولاتور مفصلی در متلب، حال شما خوب باشد و عالی عمل کنید.
7
16 =>18
8
18 =>20
درجه آزادی
9
20 =>22
دستکاری کننده مفصلی که هر سه
10
22 =>24
مفصل چرخشی دارد، اما البته این
11
24 =>27
سه مفصل w قرار نیست
12
27 =>28
همه محورهای موازی با یکدیگر داشته باشند،
13
28 =>30
بنابراین یک دستکاری سه بعدی خواهد بود
14
30 =>32
که می تواند در یک محیط سه بعدی حرکت کند، بنابراین اجازه
15
32 =>34
دهید به کسب و کار بلافاصله
16
34 =>36
در اینجا دستکاری است که می
17
36 =>38
خواهم ابتدا در پایین با
18
38 =>40
رنگ آبی روشن طراحی کنم، پایه ای است که
19
40 =>42
اولین اتصال روی آن وصل می شود
20
42 =>45
، اولین مفصل را با عنوان j1 برچسب زده ام
21
45 =>47
و دارای محور z یا محور چرخش
22
47 =>49
از پایه به سمت بالا می رود و
23
49 =>51
بعد از آن اولین
24
51 =>52
پیوند را که با این رنگ سیاه در اینجا نشان داده شده است وصل می
25
52 =>55
کنم و در انتهای اولین
26
55 =>57
پیوند مفصلی را وصل می کنم
27
57 =>01:00
که دارای z باشد. -محور که از
28
01:00 =>01:02
صفحه این ویدیو خارج می شود و به دنبال آن
29
01:02 =>01:04
پیوند دیگری خواهم داشت که با این رنگ سبز نشان داده می شود
30
01:04 =>01:07
و سپس به سه می پیوندم
31
01:07 =>01:09
که به این معنی است که یک بار دیگر
32
01:09 =>01:11
محور z از صفحه نمایش رایانه شما خارج می
33
01:11 =>01:13
شود و بعد از آن
34
01:13 =>01:15
که پیوند 3 با این رنگ سرخابی نشان داده می شود
35
01:15 =>01:17
و در انتهای آن پیوند سه
36
01:17 =>01:19
، افکتور
37
01:19 =>01:21
انتهایی ابعادی وجود دارد که در اینجا نشان داده شده است،
38
01:21 =>01:22
من می خواهم این ابعاد را
39
01:22 =>01:24
در حین ایجاد گزارش در
40
01:24 =>01:26
محیط متلب دنبال کنم. و در اینجا
41
01:26 =>01:28
محور z و محور x
42
01:28 =>01:30
کادر مختصات جهان نشان داده شده است، بنابراین اجازه دهید
43
01:30 =>01:32
بلافاصله به محیط simulink برویم
44
01:32 =>01:34
و مدل سازی این ربات را شروع کنیم، بنابراین
45
01:34 =>01:35
زبان آموزان عزیز، این محیط simulink
46
01:35 =>01:37
است که من از آن استفاده خواهم کرد.
47
01:37 =>01:39
باید در اینجا روشن کنم که
48
01:39 =>01:40
همانطور که قبلاً ویدیویی در مورد نحوه
49
01:40 =>01:42
طراحی ربات ها در این محیط ساخته ام، بنابراین
50
01:42 =>01:44
ممکن است از برخی جزئیات در این
51
01:44 =>01:46
ویدیو صرف نظر کنم، بنابراین فوراً
52
01:46 =>01:49
سه مورد را که برای یک ربات اجباری است قرار می دهم.
53
01:49 =>01:51
مدل چند بدنه ny simscape و آنها
54
01:51 =>01:54
پیکربندی حلکننده uh هستند که میتوان آن
55
01:54 =>01:56
را در بخش ابزار زیر
56
01:56 =>01:58
simscape پیدا کرد، سپس باید به چند