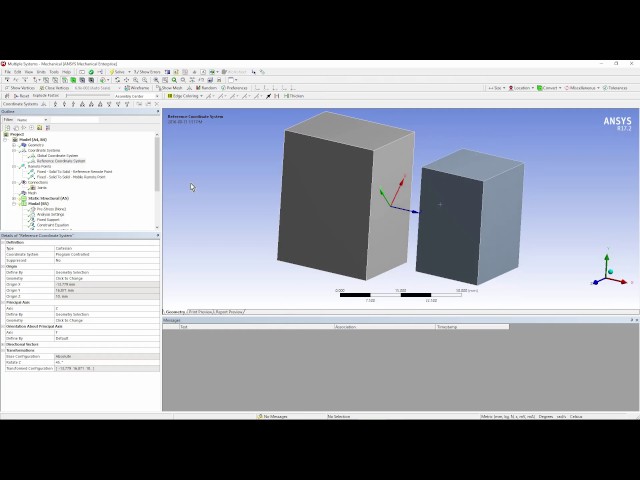
در این مطلب، ویدئو نحوه مدلسازی اتصالات از طریق محدودیتها در Ansys Workbench Mechanical با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:07:12
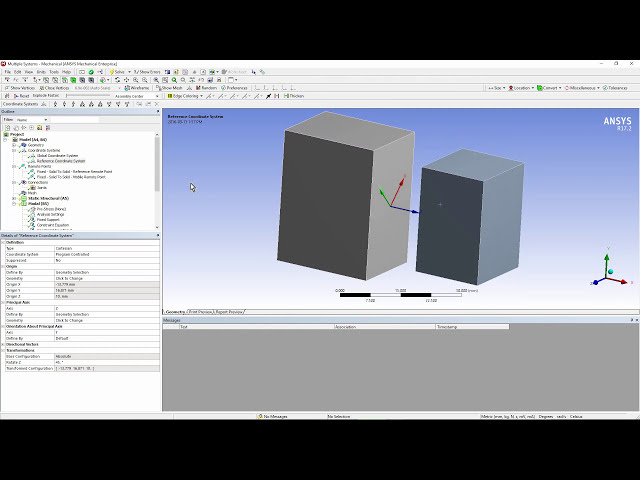
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
02 =>06
[موسیقی]
2
07 =>10
اخیراً از مشتری درخواستی داشتیم
3
10 =>14
که میخواست آنالیز مودال را روی یک
4
14 =>18
مدل بسیار بزرگ انجام دهد، ما به
5
18 =>22
حلکننده گرههای فوقالعاده پیشنهاد کردیم که مشکل این بود که
6
22 =>26
مدل شامل اتصالات بود و عناصر MPC 184
7
26 =>27
درگیر در تعاریف مشترک
8
27 =>31
از حلکننده سوپر گره جلوگیری میکرد.
9
31 =>35
در حال استفاده در اینجا، من یک
10
35 =>38
مدل ساختاری دارم و از همان مدل برای انجام
11
38 =>40
تحلیل مودال استفاده میکنم، اما آن را
12
40 =>42
مودال از پیش تنیده نمیکنم، من
13
42 =>45
راهحل اجرای ساختاری را به
14
45 =>48
اجرای مودال وصل نکردهام، فقط میخواستم
15
48 =>52
از همان مدل استفاده کنید بیایید برویم ببینیم چه چیزی داریم در
16
52 =>55
اینجا یک تجزیه و تحلیل ساختاری است در اینجا یک
17
55 =>58
تحلیل مودال
18
58 =>01:01
برای انجام این مدلسازی است.
19
01:01 =>01:04
20
01:04 =>01:06
21
01:06 =>01:10
22
01:10 =>01:14
حل گر گره برای تجزیه و تحلیل مودال من
23
01:14 =>01:18
با ایجاد یک مفصل شروع کردم تا بتوانم
24
01:18 =>01:27
یکی را ایجاد کنم، یک مفصل را وارد می کنم،
25
01:27 =>01:33
سمت مرجع را نشان می دهم، سمت هدف را نشان
26
01:33 =>01:41
می دهم و می توانم بروم و سیستم مختصات مرجع را پیدا کنم
27
01:41 =>01:43
و من می توانم از
28
01:43 =>01:45
تبدیل ها برای جهت دهی آن استفاده کنم همانطور که
29
01:45 =>01:50
دوست دارم این مفصل مانع از
30
01:50 =>01:53
استفاده از حل کننده سوپر گره می شود، اما می توانم
31
01:53 =>01:57
از ترفند کلیک راست و
32
01:57 =>02:00
ارتقاء آن به نقطه راه دور استفاده کنم که در
33
02:00 =>02:03
واقع دو نقطه راه دور بعد از من ایجاد می کند
34
02:03 =>02:08
. آن را ارتقا دادم من می توانم
35
02:08 =>02:11
مفصل خاصی را
36
02:13 =>02:17
که از قبل این کار را انجام داده ام حذف کنم و در اینجا
37
02:17 =>02:22
دو نقطه راه دور وجود دارد که یکی از
38
02:22 =>02:26
سمت مرجع آمده است، دیگری از
39
02:26 =>02:29
سمت تلفن همراه آمده است و سیستم مختصات مرجع
40
02:29 =>02:32
در اینجا این
41
02:32 =>02:36
سیستم مختصات مرجع به پایان می رسد.
42
02:36 =>02:37
سیستم های مختصات به دلیل
43
02:37 =>02:41
ارتقای اتصال به نقاط دور،
44
02:41 =>02:45
به سراغ آن رفتم و با تبدیل دوباره وارد آن
45
02:45 =>02:47
شدم به این ترتیب
46
02:47 =>02:50
محوری را که می خواستم
47
02:50 =>02:52
برای یک جهت گیری مشترک دلخواه باشد
48
02:52 =>02:56
، چند آزمایش سریع انجام دادم و
49
02:56 =>02:59
ساختار ایستا و سپس به
50
02:59 =>03:04
سراغ تحلیل مودال رفتم، حالا یک
51
03:04 =>03:07
معادله محدودیت ایجاد کردم و آن
52
03:07 =>03:10
معادله محدودیت B را بین
53
03:10 =>03:14
نقطه راه دور مرجع و
54
03:14 =>03:18
کنترل از راه دور متحرک p ایجاد کردم. Oint من ضرایب 1
55
03:18 =>03:21
و منهای 1 را دادم و کاری که انجام دادم این بود که این
56
03:21 =>03:23
معادله محدودیت
57
03:2


![فیلم آموزشی: PhotoView 360 یا SOLIDWORKS Visualize؟ [وبینار درخواستی] با زیرنویس فارسی](http://pezhvak24.ir/dl/wood/enICV-ndNqkimage2.jpg)