در این مطلب، ویدئو نحوه پیاده سازی کنترل منطق فازی در MATLAB/SIMULINK (قسمت 2) | دکتر ج.ا لاغری با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:24:58
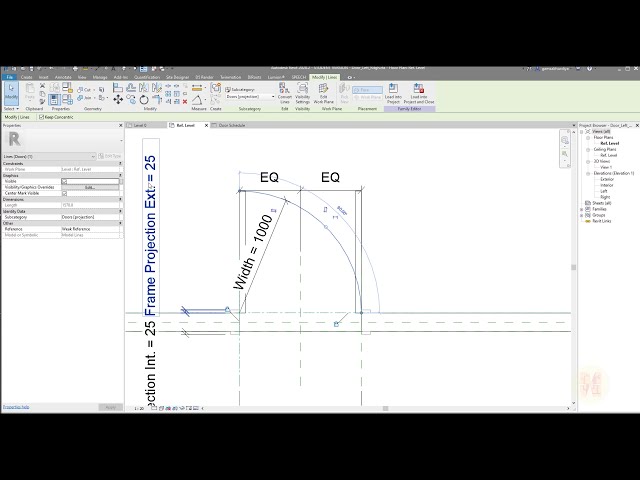
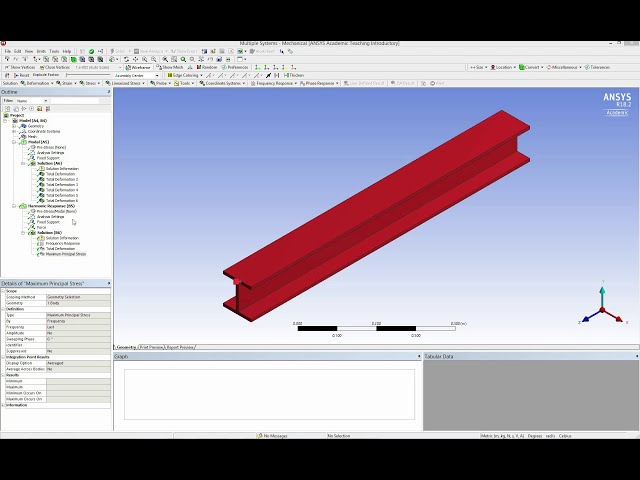
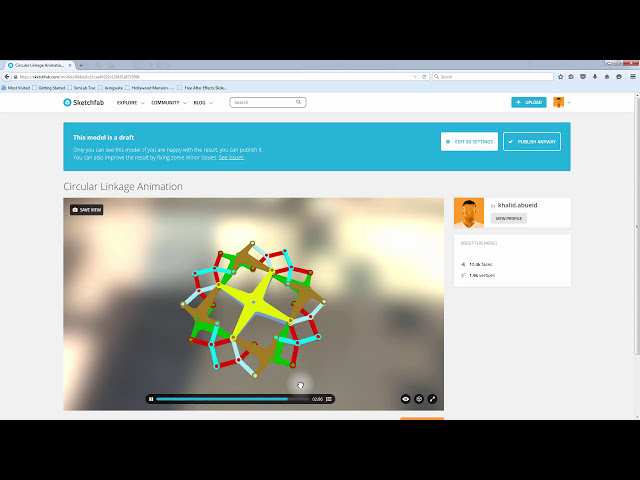
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>05
Assalam-u-
Alikum به قسمت دوم مجموعه
2
05 =>10
نحوه پیاده سازی کنترل منطق فازی در نرم افزار MATLAB/SIMULINK خوش آمدید
.
3
10 =>15
دوستان امروز قصد دارم مطالب زیر را به شما آموزش دهم
.
4
15 =>22
1. مقدمه اصلی کنترل منطق فازی
2. سیستم استنتاج فازی ممدانی
5
22 =>30
3. سیستم استنتاج فازی Takagi Sugeno
اکنون، اجازه دهید در مورد اصول کنترل منطق فازی شروع کنیم
6
30 =>34
.
همانطور که قبلاً بحث شد، رویکرد منطق
7
34 =>43
فازی توسط لطفی عسکر زاده در سال 1965 ارائه شد.
هر سیستم همیشه دارای متغیرهای ورودی و خروجی
8
43 =>50
برای کنترل پاسخ خود است. منطق فازی
اساساً با فرآیند برخورد با این
9
50 =>57
متغیرهای ورودی و خروجی سروکار دارد. فرآیند
اصلی کنترلکننده منطق فازی عمدتاً شامل
10
57 =>01:05
سه مرحله است که بهعنوان فازیسازی، موتور استنتاج مبتنی بر قوانین
و فازیسازی شناخته میشوند.
11
01:05 =>01:12
در مرحله اول، ورودی و
خروجی سیستم باید به وضوح تعریف شود.
12
01:12 =>01:17
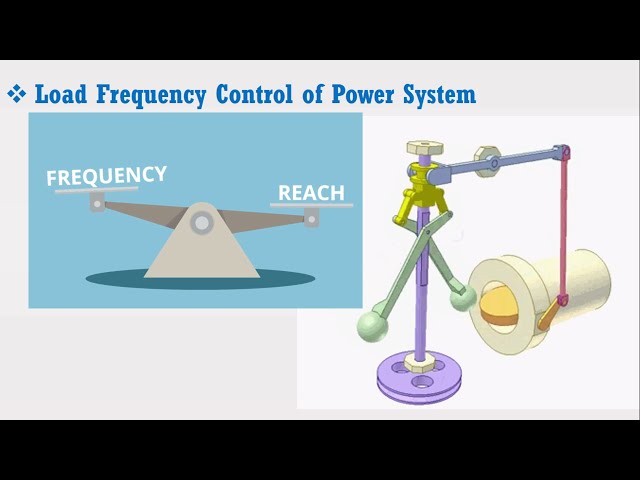
اجازه دهید مثالی از کنترل فرکانس بار سیستم قدرت را در نظر بگیریم
.
13
01:17 =>01:23
شکلی را در نظر بگیرید که
مدل تابع انتقال سیستم قدرت را نشان می دهد. می دانیم که
14
01:23 =>01:29
معمولاً از گاورنر برای کنترل
سرعت توربین به منظور ثابت نگه داشتن
15
01:29 =>01:38
فرکانس سیستم استفاده می شود. هرگاه بار به طور ناگهانی
افزایش یابد، فرکانس سیستم قدرت کاهش می یابد.
16
01:38 =>01:44
گاورنر این کاهش سرعت را حس می
کند و سیگنال را به توربین می فرستد تا دریچه آن را باز
17
01:44 =>01:51
کند تا تولید برق افزایش یابد.
هنگامی که توان تولیدی و تقاضای بار افزایش
18
01:51 =>01:58
یافته برابر باشند، فرکانس سیستم به
مقدار پایدار 50 یا 60 هرتز می رسد.
19
01:58 =>02:05
یعنی تغییر فرکانس ورودی
و موقعیت شیر توربین خروجی در
20
02:05 =>02:10
این حالت است.
دوستان
21
02:10 =>02:16
متغیرهای ورودی و خروجی را برای این مورد به وضوح تعریف کرده ایم. حال
باید محدوده این متغیرهای ورودی و
22
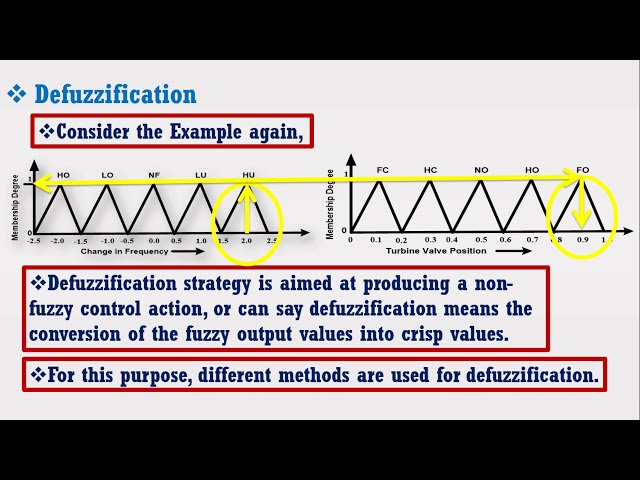
02:16 =>02:23
خروجی را در قالب توابع مختلف عضویت
تعریف کنیم. این برای ارائه
23
02:23 =>02:29
قوانین مختلف برای تغییرات بارهای مختلف ضروری است.
برای دانستن حداقل و حداکثر دامنه
24
02:29 =>02:37
ورودی، اجازه دهید فرمول را در نظر بگیریم. ما می دانیم
که تغییر در فرکانس = فرکانس مرجع
25
02:37 =>02:43
– فرکانس اندازه گیری شده.
فرکانس مرجع 50 یا 60 هرتز است. و
26
02:43 =>02:48
فرکانس اندازه گیری شده در هر لحظه
از زمان به دست می آید.
27
02:48 =>02:55
اجازه دهید مورد افزایش بار را در نظر بگیریم.
هنگامی که تقاضای تولید و بار برابر باشد،
28
02:55 =>03:00
فرکانس سیستم نیز
در 50 هرتز پایدار خواهد بود. بنابراین تغییر فرکانس
29
03:00 =>03:06
در حالت عادی 0 هرتز است.
فرض کنید به دلیل افزایش بار، فرکانس اندازه گیری شده سیستم
30
03:06 =>03:15
به 49.9 هرتز کاهش می یابد. سپس تغییر
در فرکانس 0.1 هرتز خواهد شد.
31
03:15 =>03:21
به طور مشابه، اگر افزایش عظیم
تقاضای بار را در نظر بگیریم، فرکانس سیستم ممکن است
32
03:21 =>03:28
به مقدار بسیار پایین کاهش یابد و در نتیجه
اختلاف 2 هرتز نیز ایجاد شود.
33
03:28 =>03:34
به همین دلیل فرکانس سیستم
همانطور که در شکل نشان داده شده است دچار افت تیر می شود.
34
03:34 =>03:42
حال مورد کاهش بار را در نظر بگیرید. فرض کنید
به دلیل کاهش ناگهانی بار، فرکانس اندازه گیری شده سیستم
35
03:42 =>03:51
به 50.1 هرتز افزایش می یابد. سپس تغییر
در فرکانس به -0.1 هرتز