در این مطلب، ویدئو وارد کردن سلول کاری خود به Robot Studio از SolidWorks با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:13:36
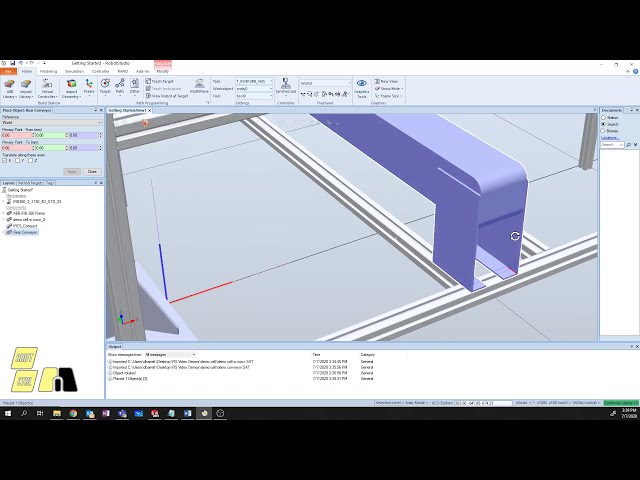
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
01 =>04
وارد کردن سلول کاری خود به ربات ها برای انجام
2
04 =>07
از SolidWorks در این ویدیو
3
07 =>09
به نحوه ذخیره سلول کاری که
4
09 =>11
در SolidWorks توسعه داده اید به
5
11 =>16
عنوان SAT و وارد کردن آن به استودیوی ربات
6
16 =>19
و همچنین گرفتن نوار نقاله ای که در اختیار
7
19 =>23
دارید می پردازیم. همه آنها را ایجاد کرده ایم و آنها را ردیف کرده ایم بنابراین
8
23 =>25
بسیار شبیه به آنچه در آزمایشگاه روباتیک داریم به نظر می رسد
9
25 =>28
علاوه بر این، ما
10
28 =>30
همچنین نحوه
11
30 =>33
تغییر رنگ ها و بافت ها را در اشیاء وارداتی خود
12
33 =>35
به گونه ای توضیح خواهیم داد که کمی به نظر برسند.
13
35 =>38
بیشتر شبیه چیزی است که در واقع دارید، اجازه
14
38 =>41
دهید شروع کنیم،
15
41 =>43
بنابراین این یکی از شبیه سازی هایی
16
43 =>47
است که در یک ویدیوی گذشته ایجاد کردیم، من
17
47 =>49
در اینجا وارد آن می شوم و می خواهم به
18
49 =>53
هندسه و فایل های آزمایشی import خود بروم این
19
53 =>57
فایلی است که من تمام هندسههای خود
20
57 =>01:00
را که در آن تعبیه شده است قرار دادهام و میخواهم
21
01:00 =>01:03
از سلول آزمایشی با نوار نقاله استفاده کنم و اکنون
22
01:03 =>01:05
چند نکته را ذکر کنم، فقط به
23
01:05 =>01:07
خاطر داشته باشید که پسوند فایلی که
24
01:07 =>01:10
میخواهید برای این کار استفاده کنید، SAT نقطهای است و
25
01:10 =>01:14
متوجه خواهید شد که وقتی این یکی را وارد می کنم، به
26
01:14 =>01:18
طور خودکار almo را وارد می کند در
27
01:18 =>01:20
نقطه درست قرار بگیرید، بنابراین اگر کمی در اینجا حرکت
28
01:20 =>01:24
کنم، می توانید متوجه شوید که آن دو
29
01:24 =>01:26
ریل در آنجا دقیقاً
30
01:26 =>01:30
زیر سلول های کار قرار دارند یا
31
01:30 =>01:33
چارچوب کمی عقب تر از پایه ای
32
01:33 =>01:35
که ربات روی آن نصب شده است و
33
01:35 =>01:38
همه چیز قرار دارد. به نوعی درست در جایی که
34
01:38 =>01:40
باید اکنون می نشیند، دلیل این اتفاق این
35
01:40 =>01:43
است که من سلول خود را در
36
01:43 =>01:47
SolidWorks با مبدا مطابق
37
01:47 =>01:49
با مبدای که شبیه سازی من بر اساس آن
38
01:49 =>01:51
بود، ساخته ام و اگر از ویدیوهای قبلی به یاد داشته باشید
39
01:51 =>01:53
که در حال انجام آن بودیم، من ساختم.
40
01:53 =>01:57
مبدأ قاب من،
41
01:57 =>02:02
مرکز جلویی پایین قاب من،
42
02:02 =>02:06
اساساً نقطه مرجع در
43
02:06 =>02:09
کل سلول کاری من است، بنابراین ما آن قاب را
44
02:09 =>02:11
در آنجا داریم، حالا یک نوار نقاله بیاوریم
45
02:11 =>02:16
و من نوار نقاله خود را در اینجا یک نوار نقاله آزمایشی ایجاد کرده ام
46
02:16 =>02:18
47
02:18 =>02:20
و ما این نوار نقاله آزمایشی
48
02:20 =>02:22
را قرار می دهیم، یکی
49
02:22 =>02:24
را با قسمت پشتی این
50
02:24 =>02:26
قاب آلومینیومی قرار می دهیم و دیگری را با
51
02:26 =>02:28
قسمت جلویی آن با
52
02:28 =>02:30
قسمت جلوی این قاب لومن قرار می دهیم، بنابراین اجازه
53
02:30 =>02:33
دهید o در مورد