در این مطلب، ویدئو چگونه داده های حسگر را در متلب تجزیه و ترسیم کنیم با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:06:37
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>03
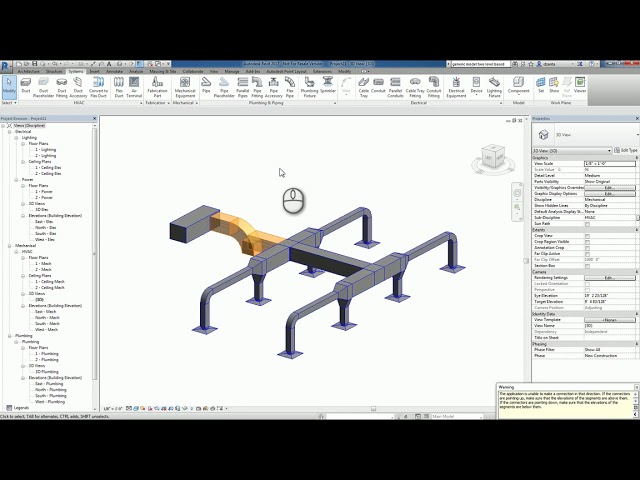
داده های تشخیص شی در اطراف Ego Vehicle.
2
03 =>09
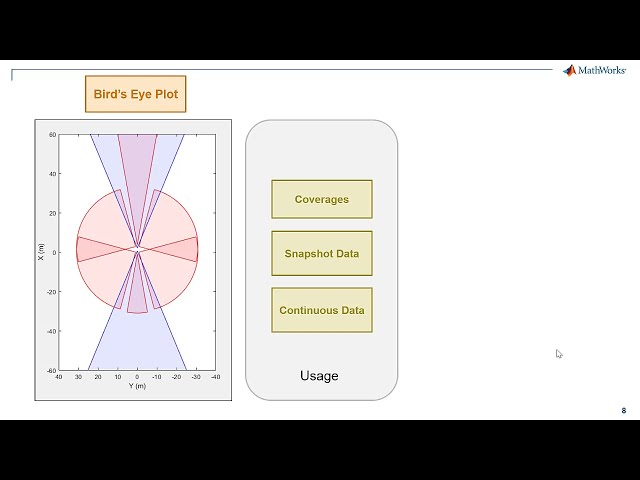
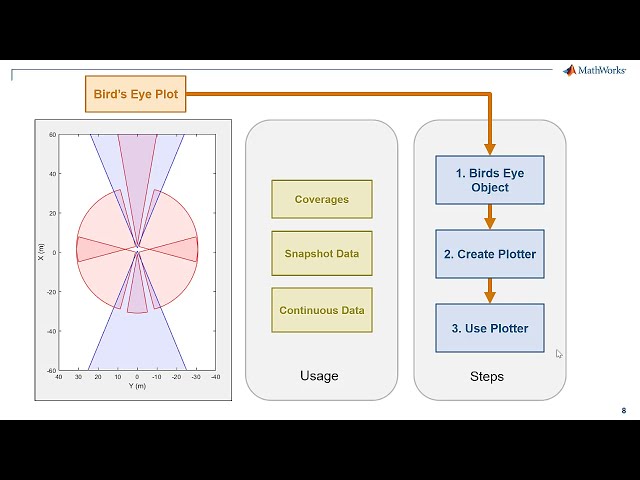
نمایش با نمای چشم پرنده برای توسعه الگوریتم های رانندگی مستقل است.
3
09 =>12
این بخش مهمی از آگاهی از وضعیت رانندگی است.
4
13 =>16
در این مثال، خروجی از یک سناریو تست در متلب
5
16 =>18
تجزیه اطلاعات حسگر و در نمای چشم پرنده
6
18 =>20
یاد بگیرید چگونه تجسم کنید.
7
20 =>23
فایل های دیتا و کد استفاده شده در این ویدیو می باشد
8
23 =>26
می توانید آن را در مثال MATLAB که در توضیحات لینک شده و مشاهده کنید
9
26 =>30
می توانید آن را با تایپ کردن مانند این در پنجره فرمان باز کنید.
10
30 =>34
بر اساس کد مثال امروز، من از اطلاعات خط، شی تشخیص دید استفاده می کنم
11
34 =>38
بیایید در مورد نحوه تجسم اشیاء قابل تشخیص رادار صحبت کنیم.
12
39 =>43
Ego Vehicle برای حس کردن محیط استفاده می شود.
13
43 =>45
خودرویی با سنسور
14
46 =>48
تمام سنسورها از Ego Vehicle هستند
15
48 =>51
اطلاعات مربوط به مکان را ارائه می دهد.
16
52 =>54
در این ویدیو یک دوربین، برد بلند و
17
54 =>59
یک سنسور رادار با حالت پوشش متوسط استفاده خواهد شد.
18
59 =>01:03
محل و جهت این سنسورها در شکل نشان داده شده است.
19
01:04 =>01:07
سنسورها در سیستم های رانندگی خودران هستند
20
01:07 =>01:09
می توان آن را در هر نقطه قرار داد.
21
01:10 =>01:14
هر سنسور دارای یک سیستم مختصات خودرو و یک سیستم مختصات سنسور است.
22
01:15 =>01:20
برای استفاده از مقادیر بازگردانده شده توسط سنسورهای جداگانه
23
01:20 =>01:26
تبدیل به یک سیستم مختصات مرجع یکپارچه به نام سیستم مختصات خودرو.
24
01:26 =>01:33
تمام وسایل نقلیه، حسگرها و سیستم های مختصات مربوطه در سیستم مختصات جهانی قرار می گیرند.
25
01:34 =>01:40
سیستم های مختصات جهانی برای برنامه ریزی مسیر جهانی، محلی سازی و نقشه برداری مهم هستند.
26
01:42 =>01:44
مورد استفاده توسط جعبه ابزار رانندگی خودکار
27
01:44 =>01:47
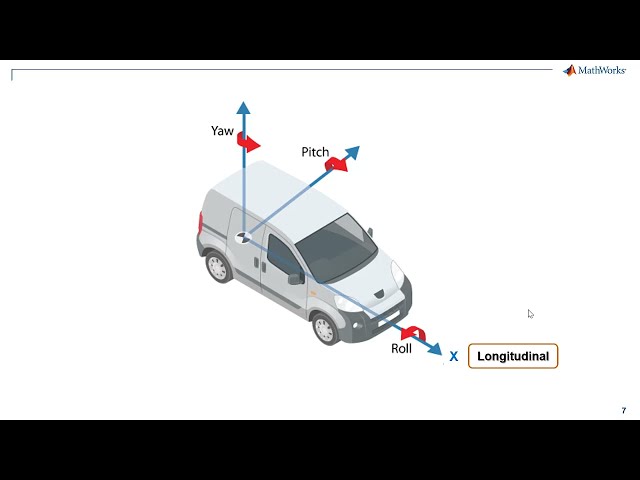
سیستم مختصات خودرو عبارت است از:
28
01:47 =>01:52
محور عمودی یا محور X در خودرو به جلو اشاره می کند.
29
01:52 =>01:59
محور افقی، محور Y، به سمت چپ خودرو و محور Z از سطح زمین به سمت بالا اشاره می کند.
30
02:00 =>02:04
مبدا در مرکز پاشنه Ego Vehicle قرار دارد.
31
02:05 =>02:10
برای جزئیات بیشتر در مورد سیستم مختصات مورد استفاده به توضیحات مراجعه کنید.
32
02:11 =>02:13
مرحله اول در دو فایل mat است
33
02:13 =>02:15
این فقط خواندن داده های مورد نیاز است.
34
02:16 =>02:19
فایل اول محل وسیله نقلیه ایگو و
35
02:19 =>02:23
شامل تنظیمات حسگر مانند مناطق تحت پوشش است.
36
02:23 =>02:27
این شامل نام سنسور و مرجع مبدا Ego Vehicle است.
37
02:27 =>02:30
زوایای X، Y، Z و انحراف، میدان دید سنسور (FOV) و
38
02:30 =>02:35
حاوی اطلاعاتی در مورد نوع سنسور، مانند محدوده فاصله.
39
02:37 =>02:39
فایل دوم برای 204 گام زمانی است
40
02:39 =>02:42
شامل داده های حسگر ثبت شده است.
41
02:42 =>02:45
تشخیص رادار و دوربین
42
02:45 =>02:49
اطلاعات مکان شی و مسیر گنجانده شده است.
43
02:49 =>02:52
اطلاعات رادار و خطوط 10 بار در ثانیه،
44
02:52 =>02:56
دوربین با 20 آپدیت ضبط شد.
45
02:57 =>03:00
بنابراین، یک منطقه خالی بین تمام تشخیص های دوربین اضافه می شود.
46
03:00,3