در این مطلب، ویدئو کنترلر PID برای دستکاری ربات در متلب 2021 | RST | SimScape با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:25:13
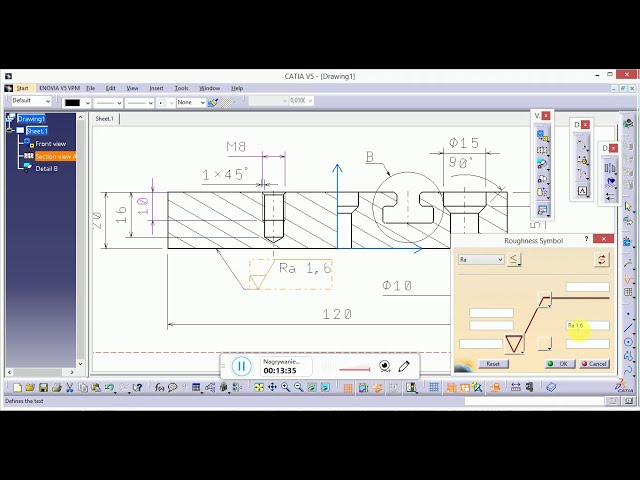
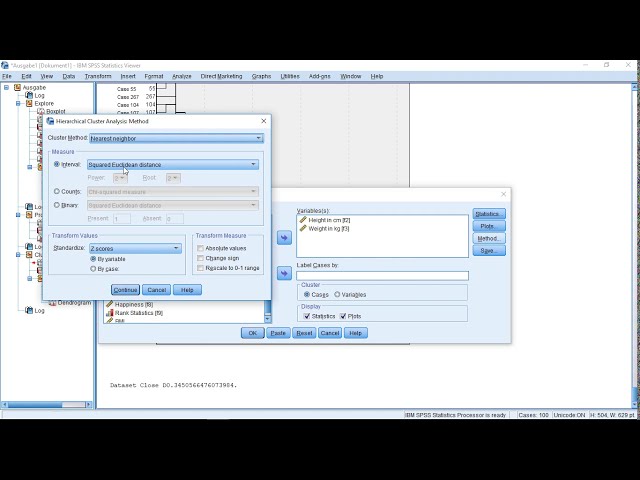
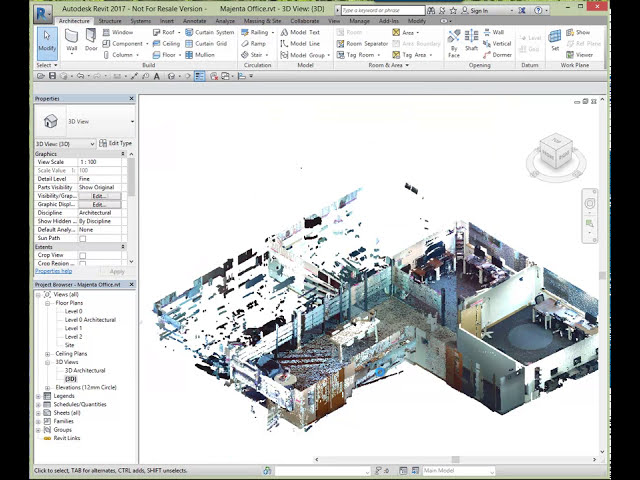
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
00 =>07
[Music]
2
07 =>09
assalamualaikum زبان آموزان عزیز امیدوارم حالتون
3
09 =>10
خوب باشه و به خصوص
4
10 =>12
ویدیو قبلی رو تماشا کرده باشید که در آن بحث
5
12 =>14
کردیم که دینامیک ربات چیست و در نهایت
6
14 =>16
چه نیازی به یک کنترلر پاداش دارد،
7
16 =>18
فقط برای خلاصه کردن کمی این چیزی بود که
8
18 =>21
در ویدیوی قبلی تولید کردیم. از
9
21 =>23
دینامیک معکوس پاداش برای بدست آوردن
10
23 =>24
گشتاورهای مورد نیاز برای حرکت در
11
24 =>27
مسیر مورد نظر خود استفاده کردیم، سپس آن
12
27 =>28
صحبتها را به دینامیک رو به جلو
13
28 =>30
رباتی دادیم که گشتاورهای مفصل را دریافت میکند
14
30 =>31
و شتابهای مشترک و در نهایت موقعیتهای مشترک را به ما میدهد که
15
31 =>34
16
34 =>35
17
35 =>37
این موقعیتهای مشترک در حالت ایدهآل باید باشند.
18
37 =>38
با موقعیت های مشترک
19
38 =>40
مربوط به مسیر مورد نیاز ما برابر بود
20
40 =>42
و دیدیم که آنها در واقع برابر هستند،
21
42 =>44
اما زمانی که همان
22
44 =>47
گشتاورها به یک ربات مدل سازی شده فیزیکی ارائه شد،
23
47 =>49
آن ربات مسیر مورد نظر ما را دنبال نکرد،
24
49 =>51
این به دلیل این واقعیت بود
25
51 =>53
که معکوس بلوک دینامیک از یک
26
53 =>55
مدل ربات ایدهآل استفاده کرد که به
27
55 =>57
نوعی با مدل ربات فیزیکی متفاوت بود
28
57 =>59
و به همین دلیل بود این تفاوت
29
59 =>01:01
گشتاور مورد نیاز برای حرکت
30
01:01 =>01:04
ربات فیزیکی باید کمی متفاوت باشد، همچنین
31
01:04 =>01:06
این نمودارها در اینجا نشان میدهند که
32
01:06 =>01:08
مسیر مورد نظر ما چه بوده است
33
01:08 =>01:10
، بلوک دینامیکی به جلو چه مسیری ایجاد کرده است و در
34
01:10 =>01:13
کدام مسیر حرکت کرده است، ما
35
01:13 =>01:14
به وضوح میتوانیم تفاوت بین مسیر
36
01:14 =>01:16
مورد نظر و مورد نظر را مشاهده کنیم. مسیر رو به جلو در
37
01:16 =>01:18
مورد مدل ربات فیزیکی
38
01:18 =>01:20
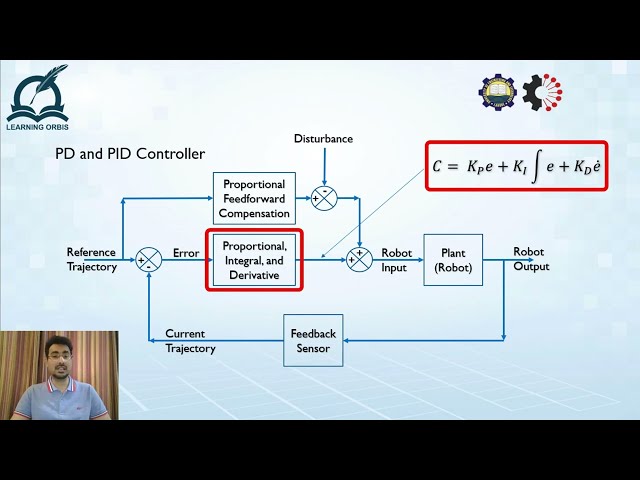
در اینجا به موضوع ویدیوی امروز می آید
39
01:20 =>01:23
که کنترلر است یک کنترلر
40
01:23 =>01:25
سیستمی خواهد بود که گشتاورهای
41
01:25 =>01:27
مناسب برای مدل ربات فیزیکی تولید می کند تا
42
01:27 =>01:29
43
01:29 =>01:32
در این ویدیو روی مسیر مورد نیاز ما حرکت کند.
44
01:32 =>01:34
فقط یک نوع کنترلر که کنترل کننده pid است
45
01:34 =>01:36
که به طور گسترده برای این منظور استفاده می شود بحث
46
01:36 =>01:39
کنید، اما نوع دیگری از
47
01:39 =>01:40
کنترلر که
48
01:40 =>01:43
کنترل کننده گشتاور محاسبه شده است، موضوع ویدیوی بعدی من خواهد بود،
49
01:43 =>01:45
بنابراین در اینجا چیزهایی است که امروز اول از
50
01:45 =>01:47
همه یاد می گیریم.
51
01:47 =>01:48
خیلی سریع
52
01:48 =>01:50
بحث خواهیم کرد که یک کنترل مشترک مستقل
53
01:50 =>01:53
و یک سیستم کنترل معمولی چیست
54
01:53 =>01:55
سپس ab ملاحظات سیستم کنترل را
55
01:55 =>01:57
برای دستکاریکنندههای رباتیک از بین
56
0