در این مطلب، ویدئو کنترل حلقه بسته شبیه سازی مبدل تقویت کننده در MATLAB/Simulink! با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:05:32
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00 =>02
[موسیقی]
2
08 =>09
سلام به همه، بنابراین
3
09 =>11
قبل از شروع ویدیوی خود،
4
11 =>12
مایلیم یک درخواست کوچک داشته باشیم، لطفاً
5
12 =>14
کانال ما را سابسکرایب کنید
6
14 =>16
و اگر به شما کمک کرد ویدیو را لایک کنید و
7
16 =>18
همچنین آن را با دوستان خود به اشتراک بگذارید که ممکن است
8
18 =>20
از این ویدیو بهره مند شوند.
9
20 =>21
در این ویدیو
10
21 =>25
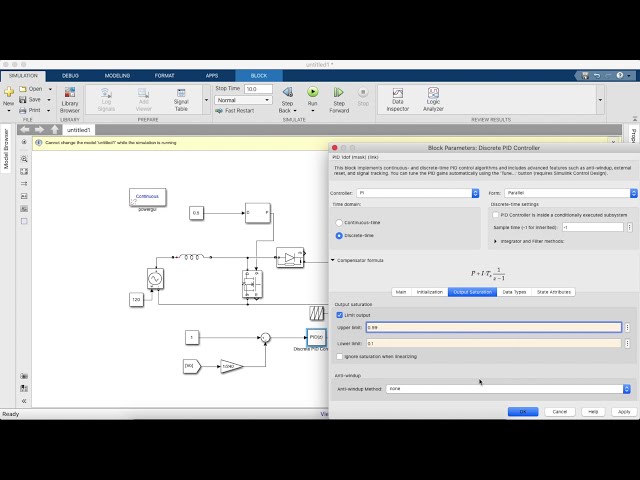
نحوه ارائه یک کنترل حلقه بسته برای
11
25 =>26
مبدل تقویت کننده را نشان خواهیم داد، بنابراین یک دوربین تقویت کننده داریم
12
26 =>28
که از قبل وجود دارد
13
28 =>29
تا نحوه شبیه
14
29 =>31
15
31 =>33
سازی مبدل تقویت کننده
16
33 =>33
را بدانید.
17
33 =>35
ابتدا به یک بلوک ثابت برای
18
35 =>37
این کار نیاز داریم و اوم
19
37 =>40
ما همچنین به یک بلوک بروی نیاز داریم که
20
40 =>41
اساساً
21
41 =>44
مرجع ولتاژی را
22
44 =>46
که اندازه گیری ولتاژ خروجی است
23
46 =>47
و um
24
47 =>50
را به ما می دهد، بنابراین به یک بلوک افزایش نیز نیاز خواهیم داشت و
25
50 =>52
ما یک در 240 انجام می دهیم، به عنوان مثال می
26
52 =>53
گوییم می خواهیم
27
53 =>55
خروجی را که هستیم اندازه گیری کنیم، می خواهیم ولتاژ خروجی
28
55 =>56
همیشه 240 باشد،
29
56 =>58
بنابراین ما یک در 240 انجام می دهیم و در هر واحد نگه می داریم
30
58 =>01:01
تا یک در واحد باشد، پس اگر
31
01:01 =>01:01
در این
32
01:01 =>01:04
صورت باشد آن را در 240 آن خواهد شد یک در هر واحد و
33
01:04 =>01:07
اگر آن و هر مقدار
34
01:07 =>01:08
ولتاژ
35
01:08 =>01:09
باشد، بر 240 تقسیم می شود و
36
01:09 =>01:12
این مقدار ولتاژ فعلی در واحد
37
01:12 =>01:15
با پایه 240 خواهد بود، اوکی است و اکنون ما به یک
38
01:15 =>01:16
بلوک جمع نیاز
39
01:16 =>01:18
داریم و باید آن را مثبت و منفی کنیم.
40
01:18 =>01:21
این
41
01:21 =>01:24
خطا را دریافت می کند که یک در
42
01:24 =>01:26
واحد منهای ولتاژ جریان در هر
43
01:26 =>01:27
واحد است
44
01:27 =>01:30
و ما به یک کنترل کننده pid گسسته نیاز داریم،
45
01:30 =>01:32
بنابراین کنترل کننده pid چیزی است که مدار ما را تنظیم
46
01:32 =>01:33
47
01:33 =>01:36
می کند و این تابع حلقه بسته را ارائه می دهد
48
01:36 =>01:40
و این چیزی است که
49
01:40 =>01:42
تنظیم می کند. ولتاژ و چرخه وظیفه را می دهد
50
01:42 =>01:42
51
01:42 =>01:46
و ما همچنین به یک بلوک مقایسه نیاز خواهیم داشت،
52
01:46 =>01:48
بنابراین خروجی کنترل کننده pid
53
01:48 =>01:51
نیز می تواند به یک بلوک dp در متلب تغذیه شود،
54
01:51 =>01:53
اما ما این کار را
55
01:53 =>01:55
انجام نمی دهیم. ما
56
01:55 =>01:55
57
01:55 =>01:58
پالسهای خودمان را ایجاد میکنیم، بنابراین به یک
58
01:58 =>02:00
دنباله تکراری نیاز داریم و
59
02:00 =>02:01
این دنباله تکراری را با کنترلکننده pid مقایسه میکنیم
60
0