در این مطلب، ویدئو کینماتیک ژاکوبین و سرعت دستکاری کننده های رباتیک در متلب 2021 | RST با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:10:27
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
00 =>07
[موسیقی]
2
07 =>09
زبان آموزان عزیز امیدوارم حالتون خوب باشه و
3
09 =>10
عالی کار کنید ویدیوی امروز
4
10 =>12
مربوط به سینماتیک سرعت
5
12 =>13
دستکاری کننده های رباتیک خواهد بود که در
6
13 =>15
ویدیوهای قبلی در مورد طراحی یک
7
15 =>17
دستکاری رباتیک در simscape یاد گرفتیم
8
17 =>19
9
19 =>21
اگر مشاهده کرده اید سینماتیک رو به جلو، سینماتیک معکوس و نسل مسیر را
10
21 =>23
مشاهده کنید. ویدیوی قبلی که مربوط به
11
23 =>24
تولید مسیر بود، پس باید
12
24 =>26
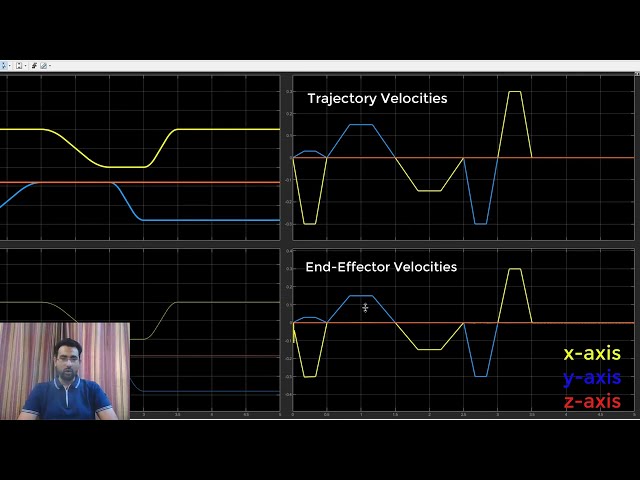
به خاطر داشته باشید که مسیر نه تنها
13
26 =>28
شامل اطلاعات موقعیت اثرگذار نهایی می شود،
14
28 =>30
بلکه شامل
15
30 =>32
اطلاعات سرعت و شتاب آن نیز می شود،
16
32 =>34
بنابراین اگر ربات مسیر خاصی را دنبال می کند،
17
34 =>35
به این معنی است که
18
35 =>37
باید موقعیت را دنبال کند.
19
37 =>39
پروفیل های سرعت و شتاب
20
39 =>41
آن مسیر تا کنون ما می دانیم که چگونه
21
41 =>43
زوایای مفصل را به موقعیت های افکتور انتهایی تبدیل کنیم
22
43 =>45
و بالعکس که
23
45 =>47
افکتورهای انتهایی به زوایای مفاصل قرار می گیرند،
24
47 =>49
اما آیا می دانیم که چگونه
25
49 =>51
سرعت های مفصل را به سرعت های موثر انتهایی تبدیل کنیم
26
51 =>54
و بالعکس این موضوع
27
54 =>55
این ویدیو که قصد داریم استخراج کنیم یک
28
55 =>58
ماتریس تبدیل که معروف
29
58 =>01:00
به ژاکوبین دستکاری آتروپاتیک است
30
01:00 =>01:02
که سرعت های مفصل
31
01:02 =>01:04
را به سرعت های موثر نهایی برای این
32
01:04 =>01:05
ویدیو تبدیل می کند یک بار دیگر من می خواهم از یک
33
01:05 =>01:07
34
01:07 =>01:09
دستکاری مسطح ساده 2 درجه آزادی استفاده کنم که در ویدیوهای قبلی طراحی کرده ایم
35
01:09 =>01:10
و من هستم اگر مطمئن نیستید که چگونه پاداش را در این مسیر هدایت کنید،
36
01:10 =>01:12
آن را بر روی یک مسیر مربعی هدایت می کنید، همانطور که در اینجا نشان داده شده
37
01:12 =>01:14
38
01:14 =>01:16
است،
39
01:16 =>01:18
لطفاً ویدیوی قبلی مربوط به
40
01:18 =>01:20
تولید مسیر را به خوبی مشاهده کنید، فقط برای
41
01:20 =>01:21
اینکه کمی تجدید نظر کنید، ما سینماتیک موقعیت را پوشش داده ایم که
42
01:21 =>01:23
در آن سینماتیک رو به جلو این کار
43
01:23 =>01:25
را انجام می دهد. زوایای مفاصل را به موقعیتهای موثر انتهایی تبدیل میکند
44
01:25 =>01:27
و سینماتیک معکوس
45
01:27 =>01:28
46
01:28 =>01:31
موقعیتهای اثرگذار انتهایی را به زوایای مفصل تبدیل میکند، اما
47
01:31 =>01:33
امروز ما میخواهیم سینماتیک سرعت را پیادهسازی کنیم
48
01:33 =>01:35
که در آن ژاکوبین ماتریس
49
01:35 =>01:37
، سرعتهای مفصل را به
50
01:37 =>01:39
سرعتهای موثر انتهایی تبدیل میکند و
51
01:39 =>01:41
ژاکوبین معکوس میتواند برای
52
01:41 =>01:43
سرعت های مشترک را با توجه به سرعت های موثر نهایی محاسبه کنید،
53
01:43 =>01:45
بنابراین w بدون تأخیر بیشتر،
54
01:45 =>01:47
بیایید به محیط simulink
55
01:4