در این مطلب، ویدئو گسسته سازی اویلر معکوس مدل های حالت-فضای در متلب با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:21:33
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
04 =>06
سلام به همه امروز ما در مورد
2
06 =>08
گسسته سازی اویلر عقب مانده
3
08 =>11
مدل های فضای حالت در متلب صحبت
4
11 =>13
خواهیم کرد شما یک تکنیک بسیار مهم
5
13 =>15
برای گسسته سازی مدل های فضای حالت را یاد خواهید گرفت
6
15 =>18
7
18 =>19
این تکنیک را می توان برای
8
19 =>22
توسعه کنترل کننده هایی برای دینامیک استفاده کرد
9
22 =>23
که سفت است
10
23 =>25
به این معنی که متغیرهای فضای حالت
11
25 =>28
مختلف متفاوت هستند. ثابتهای زمانی
12
28 =>31
یا ثابتهای زمانی
13
31 =>33
متغیرهای فضای حالتهای مختلف میتوانند بهطور قابلتوجهی
14
33 =>36
متفاوت باشند،
15
36 =>38
همانطور که همیشه من یک پست ایجاد کردم که به خوبی
16
38 =>40
همه چیزهایی را که
17
40 =>42
در این ویدیو توضیح خواهم داد، خلاصه
18
42 =>46
میکند.
19
46 =>48
20
50 =>53
21
53 =>55
22
55 =>57
روش اویلر معکوس
23
57 =>01:00
این کدها در صفحه github من پست می شوند
24
01:00 =>01:01
25
01:01 =>01:03
همه پیوندها در
26
01:03 =>01:07
توضیحات زیر این ویدئو ارائه شده است،
27
01:08 =>01:12
خوب است، بنابراین اجازه دهید ایده های اساسی را توضیح دهیم،
28
01:12 =>01:14
فرض کنیم که ما یک
29
01:14 =>01:16
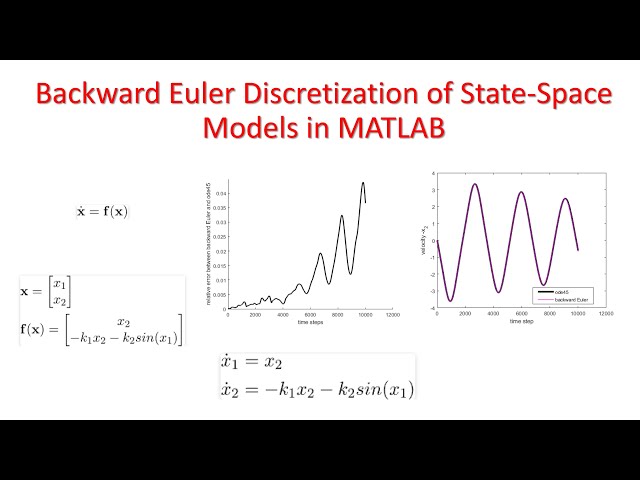
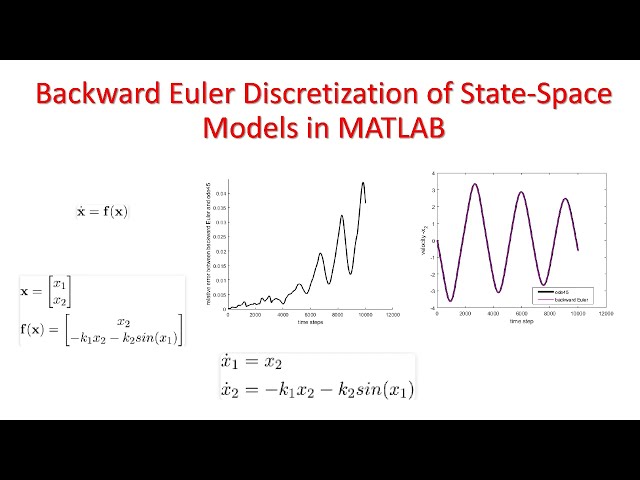
معادله دیفرانسیل پاندول غیرخطی داریم
30
01:16 =>01:19
، معادله ای که توسط معادله یک داده شده است
31
01:19 =>01:21
و اولین قدم معرفی
32
01:21 =>01:24
متغیر فضای حالت است s بنابراین می گوییم که
33
01:24 =>01:25
34
01:25 =>01:29
آلفا برابر با x1 است آلفا اساساً
35
01:29 =>01:32
چرخش آونگ است که از
36
01:32 =>01:34
محور عمودی اندازه گیری می شود
37
01:34 =>01:38
و می گوییم x2 برابر با نقطه آلفا است
38
01:38 =>01:41
بنابراین این متغیرهای فضای حالت ما هستند
39
01:41 =>01:42
بنابراین
40
01:42 =>01:44
مدل فضای حالت
41
01:44 =>01:47
ما شکل داده شده را خواهد داشت. با معادله سه x
42
01:47 =>01:49
یک نقطه برابر با x دو است
43
01:49 =>01:52
و می توانیم به دست آوریم که x دو نقطه
44
01:52 =>01:55
برابر است با منهای k1 ضربدر x2 منهای k2
45
01:55 =>01:57
سینوس x1
46
01:57 =>01:59
ما معادله دوم در
47
01:59 =>02:02
معادله سه را از دینامیک سیستم خود به دست می آوریم
48
02:02 =>02:04
که با جفت کردن سیستم است. دینامیک
49
02:04 =>02:06
داده شده توسط معادله یک با
50
02:06 =>02:08
سیستم معادلات
51
02:08 =>02:10
داده شده در معادله دو،
52
02:10 =>02:13
بنابراین دینامیک را می توان به
53
02:13 =>02:16
طور فشرده با معادله چهار
54
02:16 =>02:19
نوشت و در اینجا توضیح می دهیم x
55
02:19 =>02:22
بردار فضای حالت است و f از x یک
56
02:22 =>02:24
تابع برداری غیرخطی است
57
02:24 =>02:26
که دینامیک ما را
58
02:26 =>02:27
اکنون نشان می دهد.
59
02:27 =>02:30
میتوانیم این معادله را
60
02:30 =>02:32
برای شبیهسازی با استفاده از
61
02:32 =>02:35
روش اویلر فوروارد گسسته کنیم،
6