در این مطلب، ویدئو LCS 36b – شبیه سازی جبران کننده تاخیر طراحی شده در MATLAB Simulink با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:07:43
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
01 =>03
پس بیایید
2
03 =>06
دو کنترلر خود را تأیید کنیم و
3
06 =>09
شما می توانید آن را در پنجره دستوری matlab
4
09 =>10
نیز انجام دهید
5
10 =>13
و همچنین می توانید آن را در simulink شبیه سازی کنید
6
13 =>14
7
14 =>16
پس بیایید این کار را در simulink انجام دهیم تا شما
8
16 =>18
نیز با
9
18 =>21
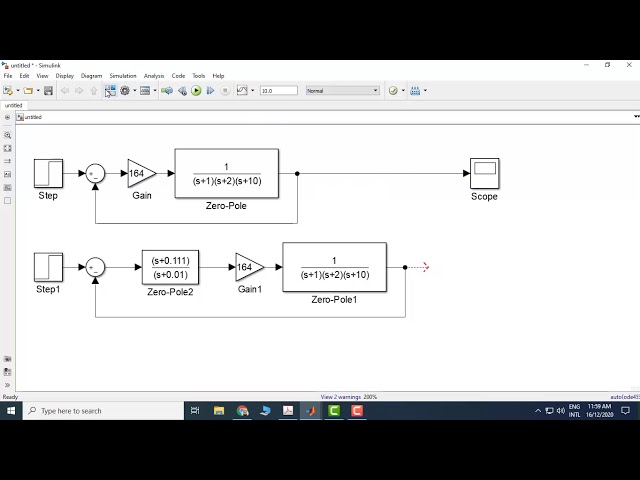
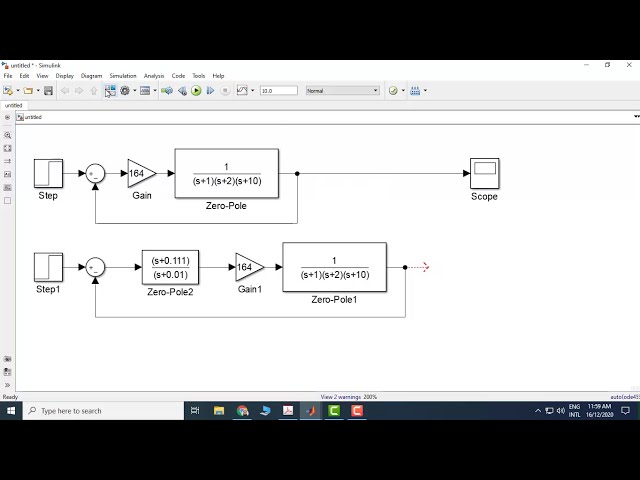
simulink آشنا شوید. اینجا مدل سیاه است
10
21 =>25
بنابراین انتقال عملکرد سیستم
11
25 =>28
uh را می توان با استفاده از
12
28 =>29
بلوک های مختلف
13
29 =>32
در اینجا پیاده سازی کرد این بلوک بلوک قطب
14
32 =>36
صفر راحت تر است و
15
37 =>41
اجازه دهید آن را ویرایش کنیم اوه
16
41 =>44
صفر محدودی وجود ندارد بنابراین اجازه دهید صفر را در اینجا قرار دهیم
17
44 =>44
18
44 =>48
قطب های سیستم Uh یک
19
48 =>51
قطب در منهای یک در ثانیه است. قطب در s
20
51 =>52
برابر با منهای دو
21
52 =>55
قطب سوم است در s برابر با منهای ده
22
55 =>59
و بهره برابر با 1 است بنابراین
23
59 =>01:03
ما این سیستم را داریم
24
01:03 =>01:06
و
25
01:08 =>01:12
دوباره اوه چرا
26
01:12 =>01:14
اینجا تمام شده است اینجا اشتباه است بنابراین
27
01:14 =>01:15
نباید صفر وجود داشته باشد.
28
01:15 =>01:19
29
01:19 =>01:22
در اینجا
30
01:22 =>01:24
وجود دارد که کدام بلوک را می توان از
31
01:24 =>01:26
بلوک های رایج استفاده کرد،
32
01:26 =>01:30
بنابراین دوباره و افزایش
33
01:30 =>01:34
164 برای دستیابی به
34
01:34 =>01:37
ویژگی های گذرا مورد نظر و
35
01:37 =>01:41
سپس بازخورد وحدت
36
01:42 =>01:46
در اینجا تفاوت بلوک است
37
01:46 =>01:49
این یکی
38
01:51 =>01:55
و سیگنال مرجع می تواند
39
01:55 =>01:58
یک ورودی گام باشد. ورودی مرحله است
40
01:58 =>02:02
و می تواند با این بلوک ارائه شود،
41
02:03 =>02:06
بنابراین ورودی مرحله و
42
02:06 =>02:10
سپس مقایسه واقعی با این یکی
43
02:10 =>02:12
در اینجا باید تفاوت باشد، بنابراین
44
02:12 =>02:14
بیایید آن را به علامت منهای منهای اعمال تغییر دهیم،
45
02:14 =>02:17
بنابراین تفاوت
46
02:17 =>02:20
به این سیستم اعمال می شود و سپس
47
02:20 =>02:21
48
02:21 =>02:23
بازخورد وحدت داریم بنابراین خروجی را می توان
49
02:23 =>02:24
50
02:24 =>02:27
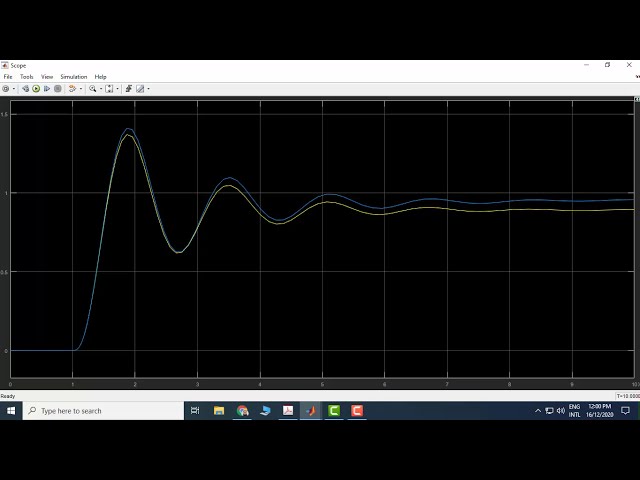
روی یک محدوده ترسیم کرد، بنابراین
51
02:27 =>02:31
بیایید از این محدوده در اینجا استفاده کنیم
52
02:31 =>02:34
و پاسخ گام سیستم را
53
02:34 =>02:35
به مدت 10 ثانیه شبیه سازی کنیم
54
02:35 =>02:39
و
55
02:39 =>02:43
پاسخ سیستم را ببینیم، بنابراین در
56
02:43 =>02:46
اینجا پاسخی است که این ناپیوستگی
57
02:46 =>02:49
ها به دلیل یک گام بزرگتر است. اندازه گرفته شده
58
02:49 =>02:50
توسط matlab
59
02:50 =>02:53
بنابراین بیایید اندازه گام را برای
60
02:53 =>02:55
شبیه سازی های عددی کاهش دهیم تا منحنی
61
02:55 =>02:56
62
02:56 =>03:00
صاف شود در ای