در این مطلب، ویدئو SOLIDWORKS شبیه سازی تحلیل روتوردینامیکی میل لنگ با استفاده از COMSOL با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 6:56:59
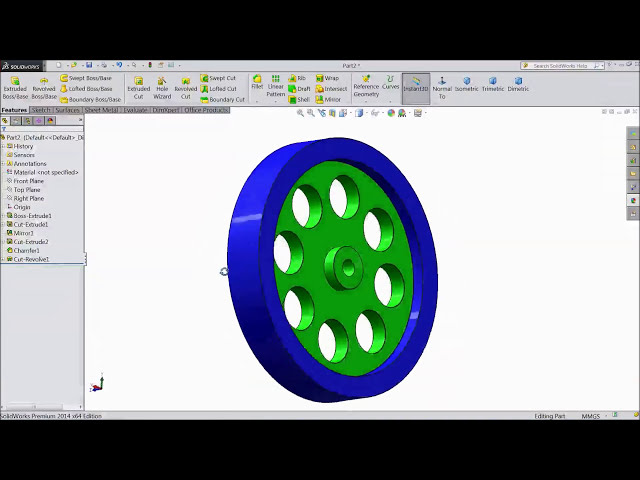
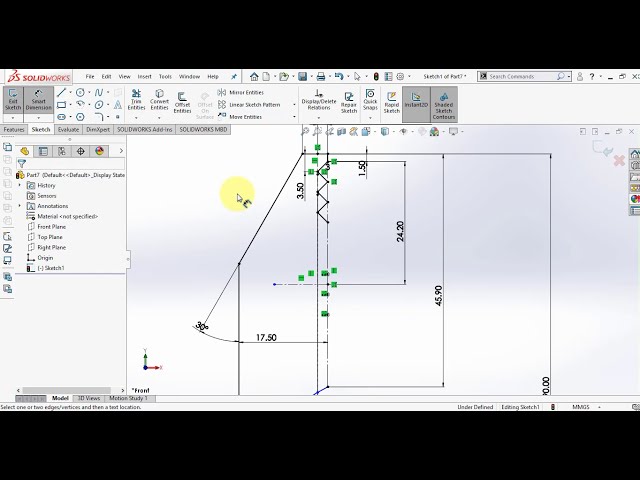
تصاویر این ویدئو:




قسمتی از زیرنویس این فیلم:
00 =>02
در این ویدیو به شما یاد می دهم که چگونه از
2
02 =>05
مولتی فیزیک کنسول برای
3
05 =>08
تجزیه و تحلیل پروتو دینامیک در شفت های مزمن استفاده کنید،
4
08 =>11
بنابراین با رفتن به جادوگر مدل خود شروع می کنیم،
5
11 =>12
جایی
6
12 =>15
که بعد فضای خود را انتخاب می کنیم،
7
15 =>16
بنابراین
8
16 =>19
در این کار یک فضای سه بعدی را انتخاب می کنیم.
9
19 =>21
روی فضای 3 بعدی کار کنید
10
21 =>24
سپس باید فیزیک خود را انتخاب کنیم
11
24 =>26
حرکت به مکانیک سازه
12
26 =>28
جایی که انتخاب می
13
28 =>32
کنیم به دینامیک می رویم
14
32 =>33
بنابراین در اینجا
15
33 =>36
خوب را انتخاب می
16
40 =>42
17
42 =>44
کنیم بنابراین روتر جامد داریم، روتر پرتو
18
44 =>44
19
44 =>46
داریم،
20
46 =>48
21
48 =>51
یاتاقان هیدرو دینامیکی دوار جامد داریم. این همان
22
51 =>54
چیزی است که ما از آن استفاده
23
54 =>56
24
56 =>59
خواهیم کرد، بنابراین ما به حالت ثابت و
25
59 =>01:01
انتخابی وابسته به زمان
26
01:01 =>01:04
ثابت
27
01:05 =>01:08
می رویم تا ما را به
28
01:08 =>01:12
رابط کاربری خود بیاوریم
29
01:12 =>01:14
دارند
30
01:14 =>01:16
یا فیزیک
31
01:16 =>01:18
در
32
01:19 =>01:20
رفتن به هندسه ما،
33
01:20 =>01:24
می خواهید آن را وارد کنید، به وارد کردن
34
01:24 =>01:25
بروید
35
01:25 =>01:27
متأسفانه
36
01:27 =>01:29
مرور کنید
37
01:29 =>01:31
سپس
38
01:31 =>01:34
39
01:36 =>01:38
هندسه خود را وارد می کنیم
40
01:38 =>01:39
بنابراین
41
01:39 =>01:41
در اینجا ما انتخاب
42
01:41 =>01:43
43
01:43 =>01:44
خواهیم کرد و ما وارد می کنیم، هندسه خود را
44
01:44 =>01:47
از یک فایل وارد می کنیم،
45
01:48 =>01:52
بنابراین در اینجا می توانیم ببینیم که چندین
46
01:52 =>01:55
فایل داریم، پارامترهای بلوتوث جت پایه بلوتوث
47
01:55 =>01:57
48
01:57 =>01:59
و موتور رفت و برگشتی تک سیلندر داریم.
49
01:59 =>02:02
ما
50
02:02 =>02:06
پارامترهای تجزیه و تحلیل پایداری شارژر جدولی را
51
02:06 =>02:11
داریم و این را نیز
52
02:12 =>02:14
داریم، بنابراین با استفاده از
53
02:14 =>02:16
54
02:16 =>02:19
موتور رفت و
55
02:20 =>02:25
برگشتی این موتور رفت و برگشتی ریشه تا md4 را انجام می
56
02:26 =>02:28
دهیم، این همان چیزی است که وارد می کنیم، بنابراین ادامه می دهیم
57
02:28 =>02:30
و این را قرار می دهیم و
58
02:30 =>02:33
هندسه خود را تا می توانید انجام می دهیم.
59
02:33 =>02:36
حالا ببینید ما به پارامترهای خود می رویم که در آنجا
60
02:36 =>02:38
به صورت دستی
61
02:39 =>02:43
پارامترهای خود را وارد می کنیم
62
02:52 =>02:55
، ببینیم
63
03:04 =>03:07
بله
64
03:36 =>03:39
بله
65
03:56 =>03:59
بله
66
04:10 =>04:13
خوب است
67
04:14 =>0






![فیلم آموزشی: طراحی خانه در معماری Revit [کارشناس Pts CAD]](http://pezhvak24.ir/dl/wood/59MRAaCWuHsimage2.jpg)