در این مطلب، ویدئو SOLIDWORKS Motion – نکاتی برای رباتها در شبیهسازی حرکت با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:10:30
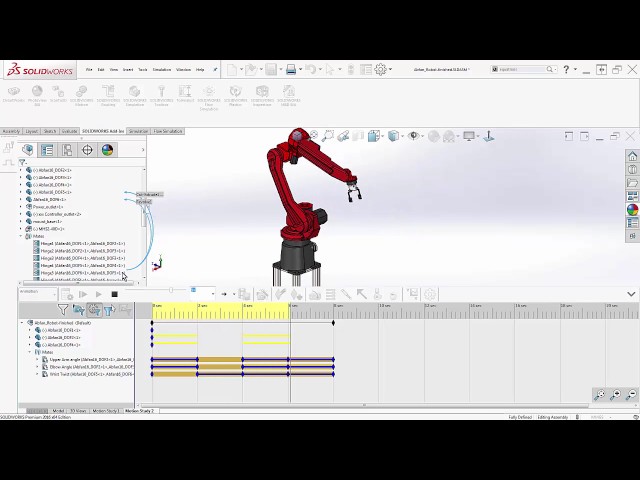
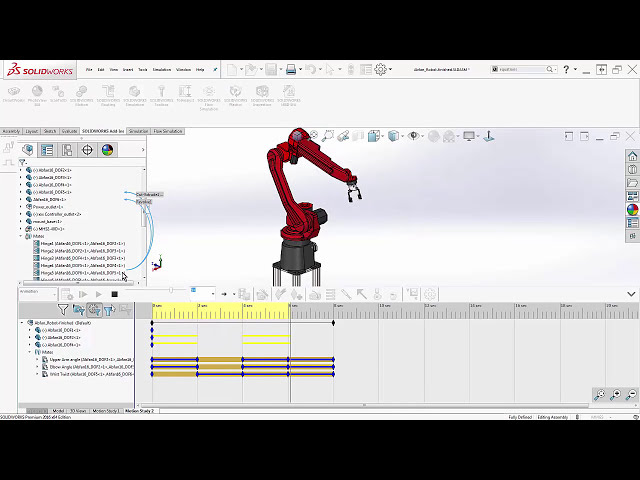
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
05 =>08
سلام من شیوانی هستم با مهندس NGO
2
08 =>11
این وبینار حرکت در مجموعه ها را پوشش می دهد
3
11 =>14
و به طور خاص این بازوی رباتیک را
4
14 =>17
به دو صورت انیمیشن می سازم یک روش در
5
17 =>20
روش جدید 2016 است و روش دوم
6
20 =>23
برای نسخه های قبلی است همچنین مقداری
7
23 =>26
اندازه موتور را با مطالعه حرکت
8
26 =>29
و همچنین سایر نکات حرکتی اگر اینها
9
29 =>30
درویدهایی هستند که به دنبال آنها هستید، پس بیایید
10
30 =>33
ابتدا شروع کنیم به
11
33 =>36
روند کلی جفت ها در این مجموعه توجه کنیم آنها
12
36 =>39
اکثریت جفت های لولا و زاویه هستند
13
39 =>42
نه جفت های متحدالمرکز متحرک آزاد، این
14
42 =>44
برای افراد مهم است. تکنیک جدید انیمیشن
15
44 =>46
به نام mate controller است
16
46 =>50
و دوباره در سال 2016 جدید است که در مونتاژ همت های خاصی را کنترل می کند
17
50 =>52
این
18
52 =>54
دکمه در اینجا تمام
19
54 =>58
شکاف فاصله محدود زاویه محدود فاصله زاویه را جمع آوری می کند
20
58 =>01:01
و با جفت در کل مونتاژ
21
01:01 =>01:04
وقتی این کار را انجام دادیم نمی توانیم
22
01:04 =>01:07
تمام بازو را از طریق صفحه گرافیکی بکشید، در
23
01:07 =>01:10
عوض، ما جفتها را بهصورت جداگانه
24
01:10 =>01:13
از طریق این نوارهای لغزنده کنترل میکنیم، اگر در هر زمانی
25
01:13 =>01:15
یک جفت را به گونهای که دوست ندارید حرکت دهید،
26
01:15 =>01:18
میتوانید دوباره آن را انجام دهید. اکنون موقعیت را تنظیم کنید، ایده این است
27
01:18 =>01:20
که ما موقعیتهای مختلفی ایجاد میکنیم، مانند یک
28
01:20 =>01:23
سری عکسهای فوری که نشاندهنده
29
01:23 =>01:26
عملکرد کامل در بازو هستند، چیزی که من
30
01:26 =>01:28
برای موقعیت 2 تنظیم میکنم،
31
01:28 =>01:30
بازویی است که برای برداشتن
32
01:30 =>01:32
چیزی که ممکن است فوراً
33
01:32 =>01:35
برای آن آشکار نباشد، دراز شده است. من کدام یک از زوجها کدام
34
01:35 =>01:37
قطعات ربات را کنترل میکند، اما اگر
35
01:37 =>01:40
جفتهای مختلف را در کادر انتخاب خود انتخاب کنم
36
01:40 =>01:42
، برجستهسازی پویا را میبینم که چهرههایی
37
01:42 =>01:45
را که آن جفتها را تشکیل میدهند به من نشان میدهد، این کار
38
01:45 =>01:47
برای من آسانتر میشود که بگویم میخواهم
39
01:47 =>01:50
بازو را اصلاح کنم. زاویه mate اکنون
40
01:50 =>01:53
قبلاً گفتم ما از لغزنده ها استفاده می کنیم، اما اگر
41
01:53 =>01:55
روی نماد قفل کلیک کنیم، می توانیم
42
01:55 =>01:58
بازوی ربات را آزادانه بکشیم در حالی که
43
01:58 =>02:01
صرفاً آن جفت را تنظیم می کنیم، می توانم زوایای نهایی را نیز تایپ کنم
44
02:01 =>02:04
و همچنین ربات به شکلی که
45
02:04 =>02:06
من تصور می کردم به نظر می رسد. این
46
02:06 =>02:09
بهروزرسانیها را ذخیره کنید که در موقعیت سوم
47
02:09 =>02:11
چرخش گیره، اما در نهایت در
48
02:11 =>02:14
موقعیتی بسیار مشابه با جایی که قرار دارد،
49
02:14 =>02:18
به آن نقطه برمیگردم، حالا
50
02:18 =>02:19
بعد از ایجاد این سه موقعیت،
51
02:19 =>02:22
آنها در t ذخیره میشون