در این مطلب، ویدئو SOROTOKI: یک ابزار رباتیک نرم منبع باز برای MATLAB با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید. اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:02:35
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
02 =>04
سلام به همه، نام من برندون است، من
2
04 =>05
دانشجوی دکترا در دانشگاه
3
05 =>07
آیندهوون هستم و بحث دو دقیقه ای من
4
07 =>09
5
09 =>11
در مورد Sir Toki و نرم افزار منبع باز در مورد این جعبه ابزار برای
6
11 =>12
mallab است،
7
12 =>15
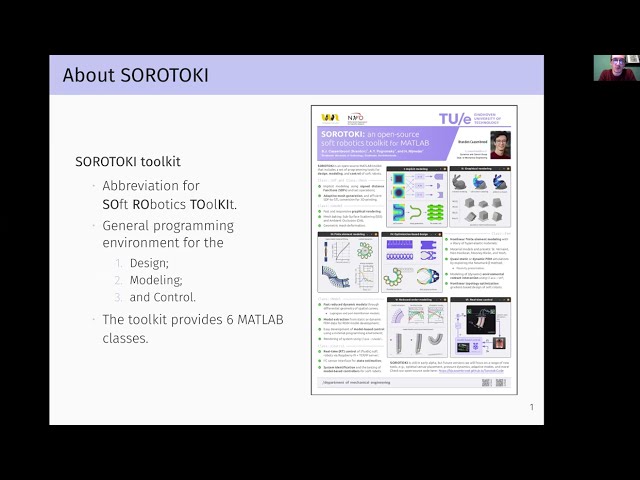
بنابراین seratoki suretoki مخفف
8
15 =>18
soft robotics toolkit و آن است. یک
9
18 =>20
محیط برنامهنویسی کلی برای
10
20 =>23
مدلسازی طراحی و کنترل رباتهای نرم و
11
23 =>25
ما این کار را با استفاده از شش کلاس متلب مختلف انجام میدهیم
12
25 =>27
که هر کدام عملکرد خاصی
13
27 =>29
دارند و سپس در سخنرانی
14
29 =>31
کوتاه من در مورد این موضوع صحبت خواهیم کرد،
15
31 =>34
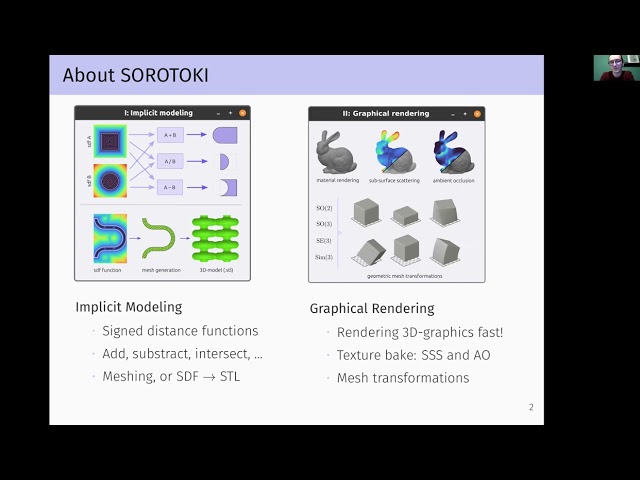
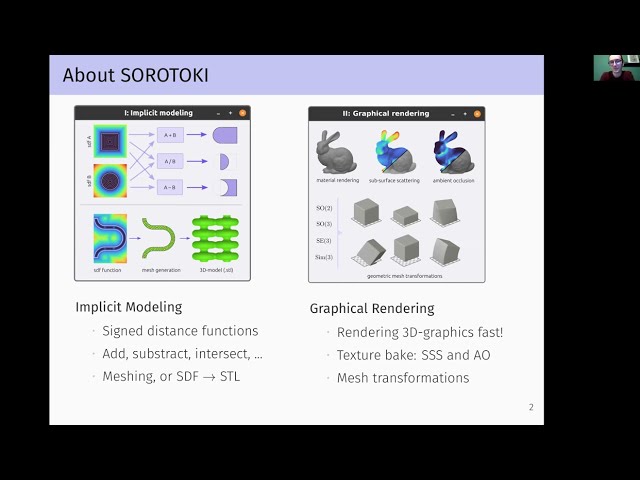
بنابراین soratoki به طور خاص چه کاری میتواند انجام دهد.
16
34 =>36
می توان
17
36 =>39
برای مثال برای مدل سازی ضمنی برای
18
39 =>42
تولید هندسه برای ربات های نرم استفاده کرد و
19
42 =>44
ما این کار را با استفاده از توابع فاصله سینوسی انجام می دهیم،
20
44 =>46
بنابراین شما می توانید
21
46 =>48
این توابع را تفریق یا قطع کنید تا
22
48 =>50
هندسه های پیچیده از این
23
50 =>53
24
53 =>55
هندسه ها ایجاد کنید.
25
55 =>57
و سپس این فایلهای scl را میتوان
26
57 =>59
به رندر گرافیکی ما برای رندر کردن
27
59 =>01:02
متریال یا بافتهای مختلف وارد کرد و
28
01:02 =>01:04
حتی میتوانیم تبدیلهای مش خاص orm
29
01:04 =>01:07
برای تغییر شکل این
30
01:07 =>01:09
مشهای
31
01:09 =>01:11
سهبعدی ساراتوکی همچنین با یک حلکننده المان محدود غیرخطی ارائه میشود
32
01:11 =>01:14
که میتواند با
33
01:14 =>01:16
مواد neohukian munis و yo مقابله کند
34
01:16 =>01:18
،
35
01:18 =>01:20
ما میتوانیم به صورت شبه استاتیک یا
36
01:20 =>01:21
پویا مدلسازی کنیم و حتی میتوانیم
37
01:21 =>01:23
تماس محیطی را
38
01:23 =>01:25
نیز شامل کنیم که میتوانیم انجام دهیم. چیزی است که
39
01:25 =>01:27
به آن طراحی مبتنی بر بهینه سازی می گویند که در آن
40
01:27 =>01:29
شما از بهینه سازی توپولوژی غیر خطی
41
01:29 =>01:31
برای تولید یک توپولوژی خاص برای
42
01:31 =>01:34
ربات نرم استفاده می کنید، این یک طرح مبتنی بر گرادیان
43
01:34 =>01:35
است و ما از توابع فاصله سینوسی
44
01:35 =>01:37
برای صاف کردن
45
01:37 =>01:39
این توپولوژی ها استفاده
46
01:39 =>01:41
می کنیم، کاری که می توانیم انجام دهیم این است که
47
01:41 =>01:44
می توانیم از fem برای استخراج
48
01:44 =>01:46
حالتهای دینامیکی خاص در رباتهای نرم خود استفاده کنید
49
01:46 =>01:48
و از این حالتهای پویا
50
01:48 =>01:51
میتوانیم مدلهای دینامیکی بسیار سریعی را
51
01:51 =>01:53
ایجاد کنیم که میتوانیم در زمان واقعی شبیهسازی کنیم
52
01:53 =>01:55
و با این مدلها میتوانیم
53
01:55 =>01:57
کنترلکنندههای مبتنی بر مدل را توسعه
54
01:57 =>01:59
دهیم و در نهایت میتوانیم از این کنترلکنندههای مبتنی بر مدل استفاده کنیم.
55
01:59 =>02:01
و
56
02:0