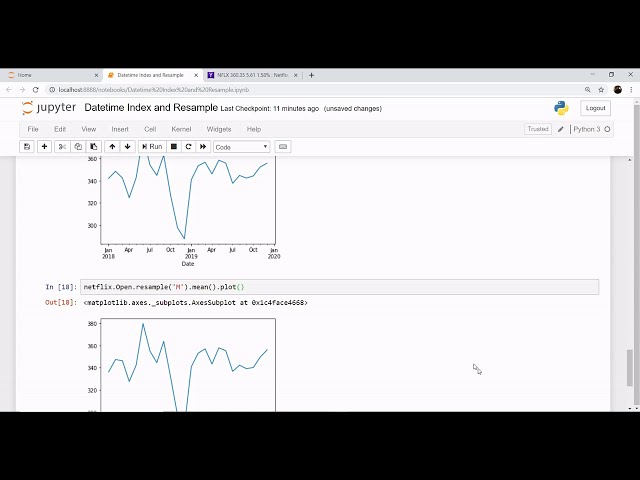
در این مطلب، ویدئو [ROS Q&A] 149 – چگونه با استفاده از Python به موقعیت مشترک یک ربات در ROS فرمان دهیم؟ با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
00:00:00,730 –> 00:00:04,230
[موسیقی]
2
00:00:05,450 –> 00:00:08,250
سلام توسعه دهندگان راس به یک
3
00:00:08,250 –> 00:00:10,740
ویدیوی جدید در مورد نحوه توسعه با راس خوش آمدید، اگر
4
00:00:10,740 –> 00:00:12,660
می خواهید چیزی در مورد راس بیاموزید،
5
00:00:12,660 –> 00:00:15,660
این کانال ناوبری متقابل شماست راس
6
00:00:15,660 –> 00:00:16,500
با هواپیماهای بدون سرنشین
7
00:00:16,500 –> 00:00:18,960
راس ماشین های خودمختار همه چیز راس
8
00:00:18,960 –> 00:00:21,240
اینجاست، سپس راس گام به گام و
9
00:00:21,240 –> 00:00:22,800
یادگیری لورا را فشار دهید با چند دقیقه
10
00:00:22,800 –> 00:00:26,640
ویدیو سلام من ماریو هستم و امروز می
11
00:00:26,640 –> 00:00:30,420
خواهیم نحوه فرمان دادن به
12
00:00:30,420 –> 00:00:32,668
موقعیت مشترک یک ربات در Zeebo را
13
00:00:32,668 –> 00:00:36,870
با استفاده از یک ناشر در راس بررسی کنیم، اما قبل از
14
00:00:36,870 –> 00:00:39,809
شروع به یاد داشته باشید که از
15
00:00:39,809 –> 00:00:42,329
آکادمی آنلاین ما بازدید کنید.
16
00:00:42,329 –> 00:00:44,640
دوره های آنلاین عملی راس را
17
00:00:44,640 –> 00:00:47,850
با استفاده از ربات های شبیه سازی شده بدون
18
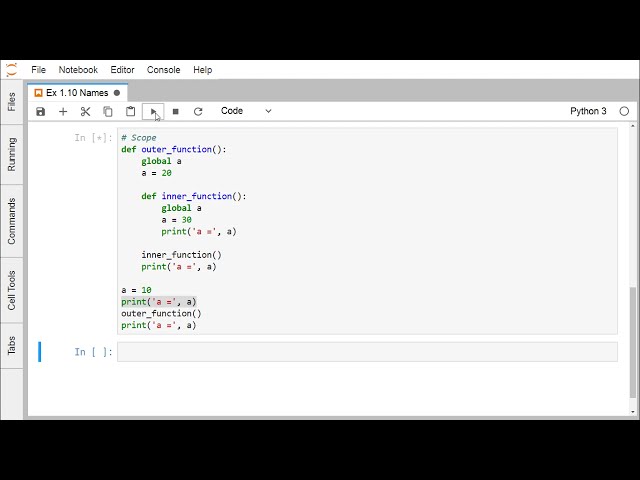
00:00:47,850 –> 00:00:50,250
نیاز به نصب و راه اندازی پیدا خواهید کرد و پیوندی
19
00:00:50,250 –> 00:00:52,410
به آکادمی در توضیحات ویدیوی
20
00:00:52,410 –> 00:00:56,390
زیر پیدا خواهید کرد. بیایید به سوال مربوط به دارونما برگردیم.
21
00:00:56,390 –> 00:01:02,010
22
00:01:02,010 –> 00:01:05,250
23
00:01:05,250 –> 00:01:08,760
کنترل برای ترکیب ربات من
24
00:01:08,760 –> 00:01:12,030
نامرئی من می توانم آن را با استفاده از دستورات مثال ارسال دستی کنترل کنم،
25
00:01:12,030 –> 00:01:15,030
خوب،
26
00:01:15,030 –> 00:01:17,869
شما می توانید ربات را با استفاده از
27
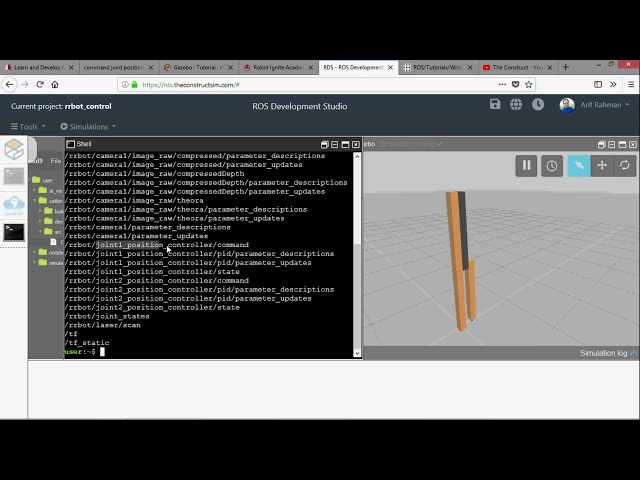
00:01:17,869 –> 00:01:21,390
دستی و همچنین با استفاده از GUI cutie ما
28
00:01:21,390 –> 00:01:24,210
برای ارسال c کنترل کنید. ommands اکنون
29
00:01:24,210 –> 00:01:26,939
با ادغام یک ناشر در نود در
30
00:01:26,939 –> 00:01:29,130
راس و ارسال دستور تصادفی به مفاصل دستور را تنظیم
31
00:01:29,130 –> 00:01:33,030
می کنم تا به آنها اجازه حرکت درست بدهند، بنابراین
32
00:01:33,030 –> 00:01:37,740
بیایید این آموزش را بررسی کنیم، خوب، بنابراین
33
00:01:37,740 –> 00:01:41,130
این یک آموزش در وب سایت gazebo
34
00:01:41,130 –> 00:01:45,420
در مورد نحوه ادغام Ross است.
35
00:01:45,420 –> 00:01:49,170
شبیه سازی gazebo مدل gazebo را کنترل کنید، بنابراین یک
36
00:01:49,170 –> 00:01:52,049
آموزش بسیار خوب است، بنابراین اگر اتفاق افتاد باید این کار را انجام دهید،
37
00:01:52,049 –> 00:01:56,549
بنابراین در مورد اضافه کردن
38
00:01:56,549 –> 00:02:00,180
انتقال با افزودن پلاگین کنترل Venable Ross صحبت می
39
00:02:00,180 –> 00:02:07,890
شود، بنابراین به عنوان مثال، این
40
00:02:07,890 –> 00:02:11,879
آموزش بر روی برد RR ساخته
41
00:02:11,879 –> 00:02:13,670
می شود. ربات بسیار ساده
42
00:02:13,670 –> 00:02:18,440
اما به اندازه کافی خوب است که یک نمونه باشد،
43
00:02:18,440 –> 00:02:23,630
پس این انتقال
44
00:02:23,630 –> 00:02:28,790
این افزونه است، سپس یک بسته جدید ایجاد کنید،
45
00:02:28,790 –> 00:02:31,070
همه چیز را در یک بسته قرار دهید،
46
00:02:31,070 –> 00:02:34,460
فایل پیکربندی کنترل Emma و در نهایت یک فایل پاسخ
47
00:02:34,460 –> 00:02:41,180
بسیار خوب است، بنابراین خوب است، بنابراین اینگونه می توانید
48
00:02:41,180 –> 00:02:44,900
به صورت دستی دستورات را به ربات بفرستید و
49
00:02:44,900 –> 00:02:48,020
این نیز نحوه انجام آن با استفاده از r2 t
50
00:02:48,020 –> 00:02:53,900
سبز okay است، بنابراین opie می گوید که شما می توانید
51
00:02:53,900 –> 00:02:57,230
همه چیز را خوب انجام دهید، اما او به
52
00:02:57,230 –> 00:02:59,690
دنبال آن است که با یکپارچه سازی یا انتشار به آن دستور دهد.
53
00:02:59,690 –> 00:03:01,760
g را در Ross یادداشت کنید، بنابراین این
54
00:03:01,760 –> 00:03:03,560
کاری است که می خواهید در این ویدیو انجام دهید، ما
55
00:03:03,560 –> 00:03:05,600
می خواهیم اسکریپت پایتون را بنویسیم
56
00:03:05,600 –> 00:03:08,989
که یک گره ایجاد می کند و ما در
57
00:03:08,989 –> 00:03:11,780
برخی از موضوعات منتشر می کنیم که این ربات را جابجا می
58
00:03:11,780 –> 00:03:15,920
کند تا این کار را انجام دهم.
59
00:03:15,920 –> 00:03:19,840
از استودیوی توسعه فرآیند RDS استفاده می کنیم
60
00:03:19,840 –> 00:03:25,250
و بیایید یک نام فهرست جدید ایجاد کنیم،
61
00:03:25,250 –> 00:03:29,110
این هم کنترل
62
00:03:31,280 –> 00:03:35,050
خوبی است و هم
63
00:03:35,050 –> 00:03:37,110
شما را باز می
64
00:03:39,510 –> 00:03:41,569
65
00:03:42,659 –> 00:03:45,939
کند، بنابراین اگر از
66
00:03:45,939 –> 00:03:47,860
استودیوی توسعه s-cross Ross استفاده می کنید، می توانید
67
00:03:47,860 –> 00:03:51,159
مستقیماً به دکمه شبیه سازی اینجا
68
00:03:51,159 –> 00:03:58,150
بروید و ربات ما را بگیرید. خوب پس
69
00:03:58,150 –> 00:04:03,069
این شبیه سازی ربات را راه اندازی می کند و
70
00:04:03,069 –> 00:04:09,069
سپس ما به پوسته تمام
71
00:04:09,069 –> 00:04:15,209
سونی یک IDE و احتمالاً یک پوسته دیگر نیاز خواهیم داشت،
72
00:04:20,130 –> 00:04:24,170
بنابراین این یک ربات بسیار ساده است، ربات
73
00:04:25,580 –> 00:04:30,300
دو مفصلی
74
00:04:30,300 –> 00:04:35,430
بسیار خوب، بنابراین این مشترک شماره یک
75
00:04:35,430 –> 00:04:38,850
از شماره لذت ببرید. دو و اگر ربات را می بینید که به
76
00:04:38,850 –> 00:04:41,820
این شکل در حال چرخش است، تاب خوردن رایگان است،
77
00:04:41,820 –> 00:04:44,850
به این معنی که
78
00:04:44,850 –> 00:04:46,500
احتمالاً کنترلرها بارگذاری نشده اند،
79
00:04:46,500 –> 00:04:48,780
بنابراین چگونه بررسی کنیم که می توانیم بیشتر لیست را انجام دهیم
80
00:04:48,780 –> 00:04:52,440
و می توانید سعی کنید
81
00:04:52,440 –> 00:04:57,600
هیچ موضوعی در مورد آن وجود نداشته باشد. کلمه
82
00:04:57,600 –> 00:05:00,480
کنترل er یا فرمان یا هر چیزی در آن،
83
00:05:00,480 –> 00:05:02,250
بنابراین این اولین کاری است که باید انجام دهید،
84
00:05:02,250 –> 00:05:04,830
ما باید کنترلر را
85
00:05:04,830 –> 00:05:12,200
راه اندازی کنیم
86
00:05:12,200 –> 00:05:18,210
تا راس راه اندازی
87
00:05:18,210 –> 00:05:24,300
88
00:05:24,300 –> 00:05:27,600
کند پسر ما به پوسته دیگر نگاه کنید،
89
00:05:27,600 –> 00:05:32,070
بنابراین اکنون که
90
00:05:32,070 –> 00:05:35,010
کنترلر را بارگذاری کرده ایم، باید بتوانیم
91
00:05:35,010 –> 00:05:37,920
92
00:05:37,920 –> 00:05:42,570
لیست مبحث اول را ببینیم متأسفم، ممکن است خوب باشد، بنابراین
93
00:05:42,570 –> 00:05:44,730
باید بتوانیم چیزی شبیه به این را ببینیم join
94
00:05:44,730 –> 00:05:47,730
one position controller command stretch
95
00:05:47,730 –> 00:05:51,030
توضیحات HP با به
96
00:05:51,030 –> 00:05:54,210
روز رسانی ها متفاوت است و همچنین اقامت و
97
00:05:54,210 –> 00:05:57,120
همچنین مجموعه دیگری برای شادی شماره دو
98
00:05:57,120 –> 00:06:00,630
دستور IDS و حالت وجود دارد، بنابراین اینها
99
00:06:00,630 –> 00:06:03,510
موضوعاتی هستند
100
00:06:03,510 –> 00:06:06,470
که زمانی که می خواهیم ربات را کنترل کنیم به آنها علاقه مند هستیم،
101
00:06:06,470 –> 00:06:09,270
خب، بیایید این کار را انجام دهیم.
102
00:06:09,270 –> 00:06:12,540
بچه
103
00:06:12,540 –> 00:06:18,630
هزینه مبحث ترکیبی P pub نام در موضوع
104
00:06:18,630 –> 00:06:22,100
را دوبرابر
105
00:06:23,850 –> 00:06:31,020
کنید، بنابراین فرض کنید که من 0.5 را می شنوم و
106
00:06:31,020 –> 00:06:35,440
آنها رای می دهند، بنابراین کلمه حرکت تا این حد است، بنابراین
107
00:06:35,440 –> 00:06:40,150
این شادی شماره یک است، بله، بیایید
108
00:06:40,150 –> 00:06:45,670
یک عدد دیگر را امتحان کنیم. این
109
00:06:45,670 –> 00:06:48,010
چیزی بزرگ است، بنابراین این عدد در واقع
110
00:06:48,010 –> 00:06:53,340
بر حسب رادیان است، بنابراین یک نقطه پنج رادیان قرمز است
111
00:06:53,340 –> 00:06:57,130
نه درجه، نه یک عدد دلخواه،
112
00:06:57,130 –> 00:07:00,820
بلکه بر حسب رادیان خوب است، به
113
00:07:00,820 –> 00:07:02,770
همین دلیل است که شما یک نقطه پنج
114
00:07:02,770 –> 00:07:05,650
تقریباً نصف پی است، بنابراین حدود نود
115
00:07:05,650 –> 00:07:09,400
درجه می توانید ببینید که پیوستن در حال حاضر
116
00:07:09,400 –> 00:07:12,060
حدود نود درجه است،
117
00:07:13,080 –> 00:07:16,450
خوب، پس کاری که میخواهیم
118
00:07:16,450 –> 00:07:22,030
انجام دهیم این است که اسکریپت جنگنده را بنویسیم
119
00:07:22,030 –> 00:07:25,450
که این اعداد را ارسال میکند تا بتوانیم
120
00:07:25,450 –> 00:07:28,270
روباتها را کنترل کنیم، پس
121
00:07:28,270 –> 00:07:32,380
بیایید با رفتن به سس فضایی کتاب کودک شروع
122
00:07:32,380 –> 00:07:39,730
کنیم و بسته جدید من
123
00:07:39,730 –> 00:07:44,620
آن را کنترل ربات ما با وابستگی
124
00:07:44,620 –> 00:07:47,190
آتش متقابل می نامم،
125
00:07:47,790 –> 00:07:53,460
خب، بیایید به کنترل خود برویم
126
00:07:53,460 –> 00:08:01,620
و دایرکتوری به نام اسکریپت ها را ایجاد کنیم.
127
00:08:02,320 –> 00:08:08,210
128
00:08:08,210 –> 00:08:10,910
129
00:08:10,910 –> 00:08:15,650
130
00:08:15,650 –> 00:08:19,700
بیایید یک فایل جدید بسازیم که
131
00:08:19,700 –> 00:08:24,830
آن را main تعریف می کنیم، خیلی آسان است، بنابراین م