در این مطلب، ویدئو مجموعه بهینه سازی Python GEKKO – نرم افزار بهینه سازی مهندسی رایگان با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
تصاویر این ویدئو:



قسمتی از زیرنویس این فیلم:
00:00:00,030 –> 00:00:02,250
2
00:00:02,250 –> 00:00:05,009
3
00:00:05,009 –> 00:00:10,170
4
00:00:10,170 –> 00:00:12,809
5
00:00:12,809 –> 00:00:15,660
6
00:00:15,660 –> 00:00:19,170
7
00:00:19,170 –> 00:00:22,710
8
00:00:22,710 –> 00:00:25,289
9
00:00:25,289 –> 00:00:29,039
10
00:00:29,039 –> 00:00:31,920
11
00:00:31,920 –> 00:00:33,530
12
00:00:33,530 –> 00:00:36,480
13
00:00:36,480 –> 00:00:38,910
14
00:00:38,910 –> 00:00:42,090
15
00:00:42,090 –> 00:00:44,329
16
00:00:44,329 –> 00:00:46,890
17
00:00:46,890 –> 00:00:49,170
18
00:00:49,170 –> 00:00:51,809
19
00:00:51,809 –> 00:00:54,300
20
00:00:54,300 –> 00:00:57,750
21
00:00:57,750 –> 00:01:00,719
22
00:01:00,719 –> 00:01:02,809
23
00:01:02,809 –> 00:01:05,099
24
00:01:05,099 –> 00:01:08,640
25
00:01:08,640 –> 00:01:11,040
26
00:01:11,040 –> 00:01:15,799
27
00:01:15,860 –> 00:01:17,759
28
00:01:17,759 –> 00:01:20,189
29
00:01:20,189 –> 00:01:22,470
30
00:01:22,470 –> 00:01:25,470
31
00:01:25,470 –> 00:01:27,930
32
00:01:27,930 –> 00:01:30,540
33
00:01:30,540 –> 00:01:32,729
34
00:01:32,729 –> 00:01:34,380
35
00:01:34,380 –> 00:01:37,200
36
00:01:37,200 –> 00:01:39,600
37
00:01:39,600 –> 00:01:42,030
38
00:01:42,030 –> 00:01:44,490
39
00:01:44,490 –> 00:01:47,899
40
00:01:47,899 –> 00:01:50,100
41
00:01:50,100 –> 00:01:52,829
42
00:01:52,829 –> 00:01:55,860
43
00:01:55,860 –> 00:01:58,680
44
00:01:58,680 –> 00:02:00,689
45
00:02:00,689 –> 00:02:04,380
46
00:02:04,380 –> 00:02:07,200
47
00:02:07,200 –> 00:02:09,000
48
00:02:09,000 –> 00:02:12,510
49
00:02:12,510 –> 00:02:13,530
50
00:02:13,530 –> 00:02:16,020
51
00:02:16,020 –> 00:02:18,540
52
00:02:18,540 –> 00:02:21,569
53
00:02:21,569 –> 00:02:23,760
54
00:02:23,760 –> 00:02:27,110
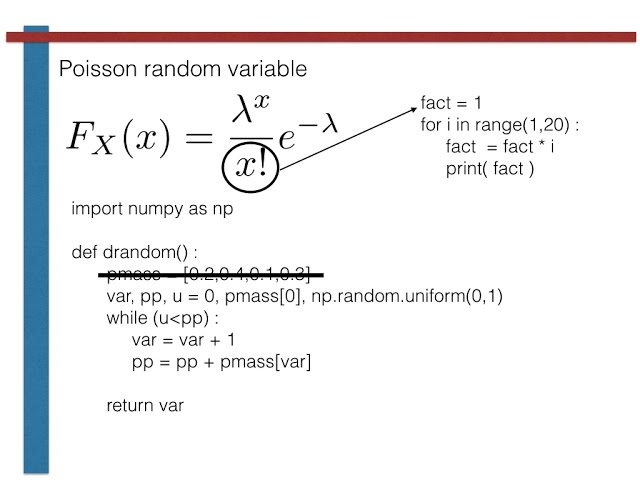
سلام و خوش آمدید به مقدمه ای برای بهینه سازی این ویدئو مجموعه بهینه سازی پویا Gecko را پوشش می دهد gecko یک پوشش پایتون است که با حل کننده های غیرخطی مانند IP opt برای بهینه سازی سیستم های پویا یا سیستم هایی که با زمان بهینه سازی پویا تغییر می کنند رابط کاربری دارد که با نام کنترل بهینه مستقیم نیز شناخته می شود. بنابراین، چه نوع مسائلی را می توان حل کرد مارمولک می تواند مسائلی را حل کند که شامل معادلات دیفرانسیل معادلات جبری یا سیستم های معادلات دیفرانسیل و جبری یا سیستم های دیفرانسیل با هم هستند، این شامل طیف گسترده ای از مسائل از جمله بهینه سازی فرآیند پالایشگاه شیمیایی بهینه سازی درجه توان هوشمند بهینه سازی حرکت روباتیک است. بهینه سازی حفاری نفت تحت فشار مدیریت شده بهینه سازی مسیر پهپاد یک بهینه سازی جوشکاری اصطکاکی اغتشاشی برای نام بردن از چند مارمولک دارای سه حالت اولیه عملیات تخمین پارامتر شبیه سازی دینامیکی و کنترل غیرخطی پیش بینی شده امروز ما بر روی کنترل تمرکز خواهیم کرد. روشهای nt برای یافتن راهحلهای بهینه برای مسائل کنترل دینامیکی روشهای متوالی و روشهای همزمان gecko این امکان را دارد که از هر یک از روشها در روش بهینهسازی متوالی استفاده کند، شرایط اولیه انتخاب شده و سیستم دینامیکی به سمت جلو یکپارچه میشود تا به هدفی که هوا اندازهگیری میشود، برسد. شرایط اولیه جدید انتخاب می شود، سیستم دوباره یکپارچه می شود و فرآیند تا رسیدن به هدف بهینه سازی تکرار می شود. این روش ها اغلب روش های تیراندازی نامیده می شوند. گسسته در طول زمان حل با استفاده از فرآیندی به نام همسازی متعامد، سیستم دیفرانسیل سپس به یک سیستم جبری تبدیل میشود، برنامه غیرخطی حاصل یا P با استفاده از تمایز خودکار پردازش میشود تا مشتقات اول و دوم سیستم دقیق به دست آید. سپس مشتقات حاصل ارسال میشوند. تی همراه با NLP به حل کننده NLP
55
00:02:27,110 –> 00:02:37,530
مانند IP opt ap opt SN opt K nitro –
56
00:02:37,530 –> 00:02:42,390
یا یکی از بسیاری از گزینه های دیگر، NLP
57
00:02:42,390 –> 00:02:47,519
راه حل بهینه را برمی گرداند.
58
00:02:47,519 –> 00:02:48,810
59
00:02:48,810 –> 00:02:51,690
60
00:02:51,690 –> 00:02:54,239
61
00:02:54,239 –> 00:02:55,620
بردارهای کنترلی که به آن
62
00:02:55,620 –> 00:02:59,940
مسیر میرسند، یک کاربرد مهم
63
00:02:59,940 –> 00:03:02,190
بهینهسازی دینامیکی در
64
00:03:02,190 –> 00:03:06,420
مدل غیرخطی کنترل پیشبینیکننده یا nm PC در nm
65
00:03:06,420 –> 00:03:08,550
PC یک نقطه تنظیم دلخواه به
66
00:03:08,550 –> 00:03:12,090
سیستم داده میشود، سپس بهینهساز
67
00:03:12,090 –> 00:03:14,340
ورودیهای کنترلی آینده را تعیین میکند که به
68
00:03:14,340 –> 00:03:17,450
خروجیهای سیستم اجازه میدهد به آن برسند. نقطه تنظیم
69
00:03:17,450 –> 00:03:19,739
این بهینه سازی در یک
70
00:03:19,739 –> 00:03:21,180
بازه زمانی در آینده انجام می شود که به عنوان افق کنترل شناخته می
71
00:03:21,180 –> 00:03:24,540
شود، سپس سیستم
72
00:03:24,540 –> 00:03:26,730
با اعمال اولین اقدام کنترلی محاسبه شده یک گام به جلو می رود و یک
73
00:03:26,730 –> 00:03:29,519
74
00:03:29,519 –> 00:03:30,989
نقطه زمانی دیگر به انتهای
75
00:03:30,989 –> 00:03:33,360
افق اضافه می شود و دوباره بهینه سازی
76
00:03:33,360 –> 00:03:36,630
انجام می شود. بارها و بارها با گذشت زمان تکرار می شود و
77
00:03:36,630 –> 00:03:38,820
78
00:03:38,820 –> 0