در این مطلب، ویدئو فیلتر ذرات با کد پایتون توضیح داده شد با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:10:07
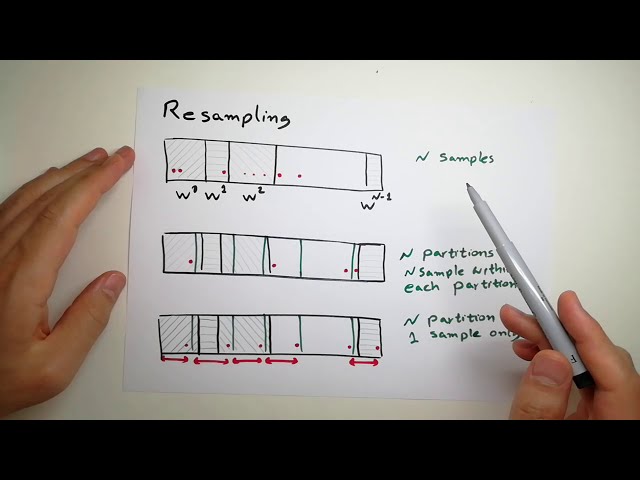
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00:00:00,030 –> 00:00:02,429
سلام، در این ویدیو می خواهم در مورد فیلتر ذرات صحبت کنم،
2
00:00:02,429 –> 00:00:06,779
3
00:00:06,779 –> 00:00:09,889
شبه کدهای زیادی را برای الگوریتم دیده ام و
4
00:00:09,889 –> 00:00:11,730
در واقع اغلب بینش خوبی
5
00:00:11,730 –> 00:00:14,820
برای درک آن به من نمی دهد، بنابراین
6
00:00:14,820 –> 00:00:18,480
تصمیم گرفتم آن را برای مشکلات دنیای واقعی
7
00:00:18,480 –> 00:00:23,600
پیاده سازی کنم. یک کد پایتون برای آن پیاده سازی کردم.
8
00:00:23,600 –> 00:00:28,080
محلی سازی ربات بر اساس
9
00:00:28,080 –> 00:00:30,689
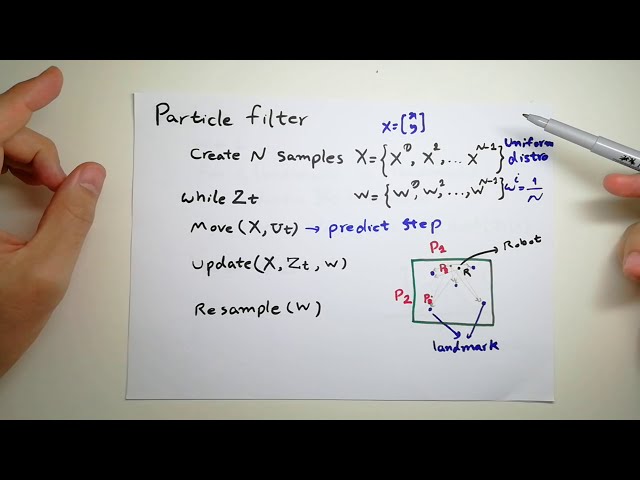
فیلتر ذرات، بنابراین مشکل ما یک
10
00:00:30,689 –> 00:00:32,729
مشکل محلی سازی است، به این معنی که
11
00:00:32,729 –> 00:00:34,950
ما نقشه را داریم اما نمی دانیم کجا هستیم،
12
00:00:34,950 –> 00:00:38,149
بنابراین سعی می کنیم خودمان را روی نقشه قرار دهیم،
13
00:00:38,149 –> 00:00:42,629
بنابراین این تنظیمات من است، من یک نقشه مانند
14
00:00:42,629 –> 00:00:44,850
این دارم محیط اطراف من
15
00:00:44,850 –> 00:00:47,039
مکان های دیدنی زیادی دارم که می توانم به طور منحصر به فرد
16
00:00:47,039 –> 00:00:52,199
آنها را شناسایی کنم و این ربات من است که می توانم
17
00:00:52,199 –> 00:00:55,710
ربات را با ماوس حرکت
18
00:00:55,710 –> 00:01:00,690
دهم تا آنها به کد من نگاهی بیندازند تا تنظیمات را ببینند و
19
00:01:00,690 –> 00:01:01,940
آن را بهتر درک کنند.
20
00:01:01,940 –> 00:01:05,549
21
00:01:05,549 –> 00:01:09,450
فیلتری که در نمونه ها ایجاد می کنیم حالتی
22
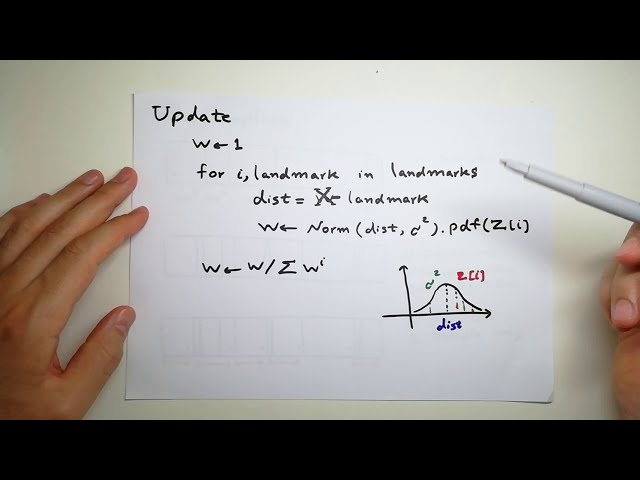
00:01:09,450 –> 00:01:13,560
که سعی می کنیم ردیابی کنیم x و y است
23
00:01:13,560 –> 00:01:16,860
زیرا سعی می کنیم داده ها را بومی سازی کنیم
24
00:01:16,860 –> 00:01:19,560
ربات متأسفم و لیوان را بومی سازی کنیم و در
25
00:01:19,560 –> 00:01:20,970
ابتدا نمی دانیم
26
00:01:20,970 –> 00:01:23,189
دقیقاً کجا هستیم ممکن است در هر جایی از این
27
00:01:23,189 –> 00:01:25,710
تنظیمات باشیم. ما با استفاده از توزیع یکنواخت
28
00:01:25,710 –> 00:01:28,770
و ما در نمونه ها ایجاد می کنیم همچنین نمی
29
00:01:28,770 –> 00:01:31,829
دانیم کدام یک به ربات نزدیک تر است
30
00:01:31,829 –> 00:01:35,250
بنابراین وزن ها برابر هستند و
31
00:01:35,250 –> 00:01:38,369
برخی باید همیشه 1 باشند بنابراین 1 بر n
32
00:01:38,369 –> 00:01:42,780
وزن برای هر ذره خواهد بود بنابراین
33
00:01:42,780 –> 00:01:47,329
به حلقه اصلی می رویم. در حلقه اصلی
34
00:01:47,329 –> 00:01:51,869
ربات را با ماوس حرکت می دهیم و چیزی
35
00:01:51,869 –> 00:01:54,180
که از آن به دست می آوریم فاصله است و
36
00:01:54,180 –> 00:01:57,180
جهتی که روند ربات را جابجا کرده
37
00:01:57,180 –> 00:01:59,880
ایم اگر اینطور پایین
38
00:01:59,880 –> 00:02:02,700
بروم منفی 90 درجه و مانند پرواز به بالا مانند
39
00:02:02,700 –> 00:02:07,680
5 پیکسل خوب است سپس بر اساس بر این اساس،
40
00:02:07,680 –> 00:02:10,410
من هر ذره را بر اساس
41
00:02:10,410 –> 00:02:13,070
فاصله و جهت حرکت میدهم که
42
00:02:13,070 –> 00:02:16,350
مانند سیم است، بنابراین این دقیقاً
43
00:02:16,350 –> 00:02:17,850
پیشبینی است، به جز این دقیقاً همان کاری است که
44
00:02:17,850 –> 00:02:24,300
ما در فیلتر کما نیز انجام میدهیم، بنابراین
45
00:02:24,300 –> 00:02:31,070
هر ذره را بر اساس آن حرکت میدهم سپس
46
00:02:31,070 –> 00:02:35,510
مقداری داده به دست میآورم و من بهروزرسانی
47
00:02:35,510 –> 00:02:40,110
میکنم اگر به اینجا نقل مکان کنم، پس فرض میکنم
48
00:02:40,110 –> 00:02:41,850
که طیف وسیعی از اسکنر یا بالای ربات
49
00:02:41,850 –> 00:02:44,190
را دارم تا بتوانم فاصله بین
50
00:02:44,190 –> 00:02:45,930
ربات و هر یک از این نشانهها را پیدا
51
00:02:45,930 –> 00:02:48,420
کنم و همانطور که گفتم میتوانم آنها را به طور منحصر به فرد شناسایی کنم
52
00:02:48,420 –> 00:02:50,010
تا دقیقا بدانم. کدام یک آل است
53
00:02:50,010 –> 00:02:51,600
ماخ شماره یک را علامت زد که یکی شماره دو
54
00:02:51,600 –> 00:02:55,890
سه و چهار خوب است، بنابراین اکنون باید
55
00:02:55,890 –> 00:02:58,770
وزن ها را بر اساس
56
00:02:58,770 –> 00:03:03,120
داده های اندازه گیری به روز کنم، باید به
57
00:03:03,120 –> 00:03:05,970
ذرات وزن بیشتری بدهم مانند
58
00:03:05,970 –> 00:03:08,190
ذره شماره یک که به ربات نزدیک تر بود تا
59
00:03:08,190 –> 00:03:11,580
p2. که
60
00:03:11,580 –> 00:03:14,760
خیلی دور بود، زیرا ما به نوعی از
61
00:03:14,760 –> 00:03:19,350
شر آنها خلاص می شویم و برای
62
00:03:19,350 –> 00:03:22,049
انجام ذراتی که به حالت واقعی ربات نزدیک تر هستند، روش بالاتری را برای انجام دادن انجام می دهیم،
63
00:03:22,049 –> 00:03:25,830
بنابراین چگونه می توانیم به
64
00:03:25,830 –> 00:03:30,030
روز رسانی را برای وزن انجام دهیم، خوب تصور کنید
65
00:03:30,030 –> 00:03:35,790
این مشکلی ندارد این به روز رسانی ما است
66
00:03:35,790 –> 00:03:38,010
ما ابتدا وزن یک را به همه
67
00:03:38,010 –> 00:03:42,930
آنها اختصاص دادیم، سپس به ازای هر نقطه عطفی که
68
00:03:42,930 –> 00:03:46,920
در مجموعه نشانه هایمان داریم
69
00:03:46,920 –> 00:03:51,840
، فاصله بین ذره خود را محاسبه می کنیم،
70
00:03:51,840 –> 00:03:52,650
71
00:03:52,650 –> 00:03:58,950
خوب است، سپس فرض کنید این
72
00:03:58,950 –> 00:04:01,620
فاصله یکی از ذرات ما از
73
00:04:01,620 –> 00:04:06,780
نقطه عطف شماره یک است. خوب پس فرض کنید
74
00:04:06,780 –> 00:04:11,940
این یک p1 است و فاصله آن از
75
00:04:11,940 –> 00:04:14,310
ذره شماره یک است و چون
76
00:04:14,310 –> 00:04:17,690
مقداری عدم قطعیت
77
00:04:17,988 –> 00:04:20,358
داریم در توزیع به این صورت است میانگین
78
00:04:20,358 –> 00:04:23,990
مقداری است که فقط
79
00:04:23,990 –> 00:04:27,080
از یک com می نویسیم. از اینجا بگذریم و
80
00:04:27,080 –> 00:04:30,949
فرض کنیم که 1 متر دورتر است که این
81
00:04:30,949 –> 00:04:35,270
اندازه گیری واقعی است مانند 1 متر
82
00:04:35,270 –> 00:04:40,400
و نیم اشکالی ندارد، بنابراین اگر این دو
83
00:04:40,400 –> 00:04:45,080
بسیار نزدیک باشند، به این معنی است که ذرات ما
84
00:04:45,080 –> 00:04:47,330
بسیار نزدیک به ربات واقعی هستند
85
00:04:47,330 –> 00:04:49,850
، مقداری را که به دست می آوریم. برای اینکه
86
00:04:49,850 –> 00:04:52,400
باید بالاتر باشد و همانطور که می بینید اگر
87
00:04:52,400 –> 00:04:55,699
به این دو نزدیکتر می شوید اگر این دو
88
00:04:55,699 –> 00:04:57,590
نزدیکتر شوند این مقدار بهتر می تواند
89
00:04:57,590 –> 00:04:59,449
بالاتر شود و اگر جلوتر برویم
90
00:04:59,449 –> 00:05:04,039
کوچکتر می شود بنابراین برای یک p2 می توانید ببینید
91
00:05:04,039 –> 00:05:07,370
که اینطور خواهد بود 8 یا 9 متر دورتر است،
92
00:05:07,370 –> 00:05:10,669
بنابراین مقدار آن بسیار دورتر