در این مطلب، ویدئو آموزش علوم داده پایتون شماره 11 – ترسیم سه بعدی با Matplotlib با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:07:06
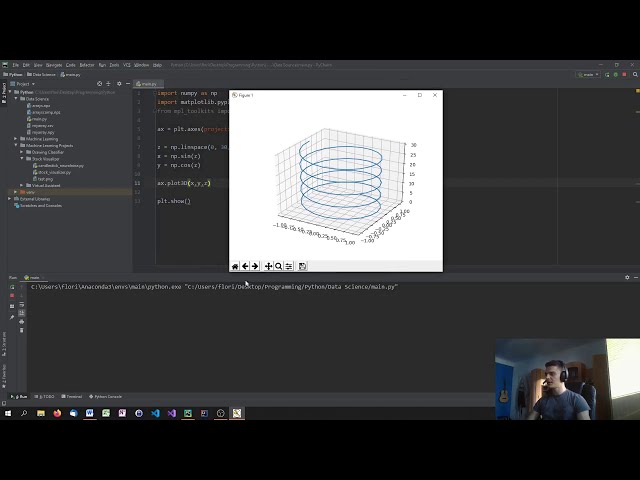
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00:00:00,030 –> 00:00:01,949
بچه ها به
2
00:00:01,949 –> 00:00:03,149
استفاده از توریست ها برای
3
00:00:03,149 –> 00:00:04,770
علم داده خوش آمدید در ویدیوی امروز ما
4
00:00:04,770 –> 00:00:06,509
وارد طرح سه بعدی می
5
00:00:06,509 –> 00:00:08,010
شویم زیرا تا به حال همیشه از دو
6
00:00:08,010 –> 00:00:09,960
بعد استفاده می کردیم و اکنون
7
00:00:09,960 –> 00:00:11,610
به بعد سوم می رویم خوب، بنابراین ما می
8
00:00:11,610 –> 00:00:14,309
خواهیم نمودارهای سه بعدی را تعریف کنیم و این
9
00:00:14,309 –> 00:00:16,049
موضوع ویدیوهای امروز است، بنابراین اجازه دهید
10
00:00:16,049 –> 00:00:19,109
وارد کد شویم تا مثل همیشه با
11
00:00:19,109 –> 00:00:21,390
وارد کردن numpy و متد lib شروع کنیم، اما
12
00:00:21,390 –> 00:00:23,189
امروز همچنین کتابخانه دیگری
13
00:00:23,189 –> 00:00:25,980
به نام MPL toolkit اضافه می کنیم. بنابراین ما میخواهیم بگوییم که
14
00:00:25,980 –> 00:00:31,529
از MPL Toolkits import m plot 3d اکنون
15
00:00:31,529 –> 00:00:34,200
این جعبهابزار MPL متعلق
16
00:00:34,200 –> 00:00:35,880
به متد lip stack است، بنابراین
17
00:00:35,880 –> 00:00:37,260
باید آن را روی رایانه خود نصب کنید و
18
00:00:37,260 –> 00:00:39,030
ما از این کتابخانه و نمودار
19
00:00:39,030 –> 00:00:41,160
3d استفاده میکنیم تا نمودارهای سه بعدی بسازیم،
20
00:00:41,160 –> 00:00:43,590
بنابراین اولین کاری که
21
00:00:43,590 –> 00:00:46,469
باید انجام دهیم این است که محوری
22
00:00:46,469 –> 00:00:48,059
را که قرار است روی آن رسم کنیم، تعریف کنیم، بنابراین می
23
00:00:48,059 –> 00:00:52,710
گوییم x برابر است با محور P Ltd و اکنون باید
24
00:00:52,710 –> 00:00:54,570
طرح ریزی را مشخص کنیم.
25
00:00:54,570 –> 00:00:58,590
میخواهیم بگوییم طرحریزی برابر با 3d به عنوان یک رشته است
26
00:00:58,590 –> 00:01:01,500
و این اساساً تنظیمی است که ما
27
00:01:01,500 –> 00:01:03,120
باید انجام دهیم و اکنون در یک زمینه سه بعدی ترسیم می کنیم،
28
00:01:03,120 –> 00:01:04,890
بنابراین آنچه که اکنون می توانیم
29
00:01:04,890 –> 00:01:07,890
انجام دهیم این است که می توانیم بگوییم PLT – اوه و ببینیم
30
00:01:07,890 –> 00:01:09,600
که ما یک سیستم مختصات سه بعدی داریم،
31
00:01:09,600 –> 00:01:12,900
بنابراین همانطور که می بینید ما انجام می دهیم.
32
00:01:12,900 –> 00:01:14,310
بدون روش معمول
33
00:01:14,310 –> 00:01:16,560
سیستم مختصات لب، ما یک
34
00:01:16,560 –> 00:01:18,990
سیستم مختصات سه بعدی و سه بعدی داریم و میتوانیم
35
00:01:18,990 –> 00:01:21,420
از آن به همان روش استفاده کنیم، بنابراین میتوانیم
36
00:01:21,420 –> 00:01:23,610
در اینجا حرکت کنیم، میتوانیم همه آن را کوچکنمایی
37
00:01:23,610 –> 00:01:27,240
کنیم، بنابراین اساساً فقط یک
38
00:01:27,240 –> 00:01:28,950
سیستم مختصات خالی است که ما می توانیم در
39
00:01:28,950 –> 00:01:31,020
حال حاضر رسم کنیم البته چون با
40
00:01:31,020 –> 00:01:32,909
سه بعد سروکار داریم اکنون باید
41
00:01:32,909 –> 00:01:36,810
سه محور یا سه متغیر مختلف
42
00:01:36,810 –> 00:01:39,060
یا سه لیست مختلف را مشخص کنیم، بنابراین کاری که
43
00:01:39,060 –> 00:01:40,979
اکنون می خواهیم انجام دهیم این است که
44
00:01:40,979 –> 00:01:44,549
یک لیست ورودی تعریف کنیم. Z که فقط MP نقطه است
45
00:01:44,549 –> 00:01:50,659
به من بدهید نمی دانم از 0 تا
46
00:01:50,659 –> 00:01:54,810
50 نه 30 0 تا 30 بود
47
00:01:54,810 –> 00:01:57,600
صد مقدار مختلف به من بدهید و اکنون
48
00:01:57,600 –> 00:02:01,799
می گوییم x برابر NP نقطه سینوس Z
49
00:02:01,799 –> 00:02:08,878
و y برابر است با NP کسینوس نقطهای Z و
50
00:02:08,878 –> 00:02:09,989
کاری که اکنون انجام میدهیم این است که اساساً در حال
51
00:02:09,989 –> 00:02:13,280
ایجاد a هستیم تابع سه بعدی
52
00:02:13,280 –> 00:02:15,890
و در محور x ما همیشه
53
00:02:15,890 –> 00:02:18,500
مقدار علامت Z را انتخاب می کنیم و در محور y
54
00:02:18,500 –> 00:02:20,960
همیشه مقدار کسینوس Z را انتخاب می کنیم و
55
00:02:20,960 –> 00:02:23,300
سپس یک نمودار سه بعدی جالب به دست می آوریم، بنابراین
56
00:02:23,300 –> 00:02:24,410
کاری که می خواهیم انجام دهیم این است که
57
00:02:24,410 –> 00:02:30,740
میخواهم بگویم PLT یا متأسفم x dot plot 3d، من فکر
58
00:02:30,740 –> 00:02:32,600
میکنم این تابع بود و سپس
59
00:02:32,600 –> 00:02:38,060
XY و z را مشخص میکنیم، بنابراین امیدوارم
60
00:02:38,060 –> 00:02:40,070
همه چیز را درست انجام داده باشم، ما یک
61
00:02:40,070 –> 00:02:42,260
ویژگی نمودار 3d نداریم، بنابراین
62
00:02:42,260 –> 00:02:45,230
نام تابع نام تابع چه بود اوه
63
00:02:45,230 –> 00:02:50,550
، حتی با D بزرگ خوانده شد، بنابراین
64
00:02:50,550 –> 00:02:53,130
بله همانطور که می بینید، ما
65
00:02:53,130 –> 00:02:55,980
در اینجا نوعی مارپیچ ایجاد می کنیم تا مقادیر ورودی را
66
00:02:55,980 –> 00:02:58,110
داشته باشیم و سپس در واقع
67
00:02:58,110 –> 00:03:01,310
برچسب ها کمی نامرتب هستند در حال حاضر
68
00:03:01,310 –> 00:03:05,100
بله، مقادیر ورودی را داریم. ما x
69
00:03:05,100 –> 00:03:08,370
و y را به عنوان یک سینوس و کسینوس داریم و این همان
70
00:03:08,370 –> 00:03:10,140
چیزی است که ما اساساً با یک
71
00:03:10,140 –> 00:03:14,040
مارپیچ سه بعدی به پایان میرسانیم، حالا کاری که در اینجا انجام دادیم این
72
00:03:14,040 –> 00:03:16,110
است که از Z به عنوان متغیر ورودی استفاده میکنیم
73
00:03:16,110 –> 00:03:18,030
و سپس دو تابع مختلف را
74
00:03:18,030 –> 00:03:21,750
روی دو محور مختلف برای رسم یک تعریف میکنیم. تابعی
75
00:03:21,750 –> 00:03:24,660
که اساساً یا با
76
00:03:24,660 –> 00:03:27,060
اعمال دو تابع در ورودی ما یک مارپیچ درست می کند ts و
77
00:03:27,060 –> 00:03:29,400
همچنین میتوانیم برعکس
78
00:03:29,400 –>