در این مطلب، ویدئو فیلتر کالمن با کد پایتون توضیح داده شده است با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:14:20
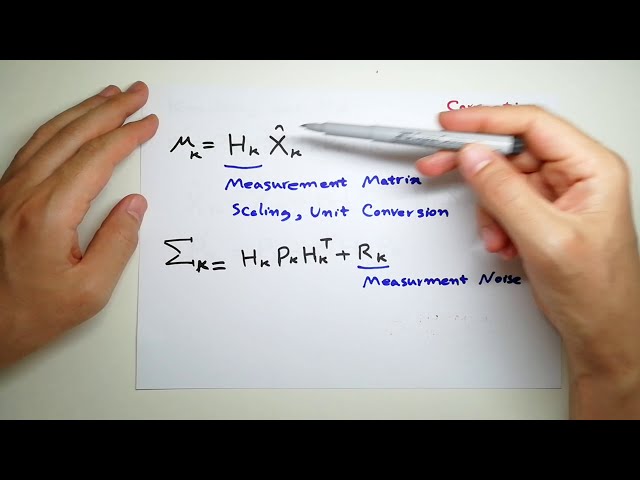
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
00:00:00,000 –> 00:00:03,380
سلام در این ویدیو من در مورد
2
00:00:03,380 –> 00:00:07,410
ادغام داده ها و فیلترهای زیر
3
00:00:07,410 –> 00:00:11,219
که در کاربردهای روباتیک بسیار رایج هستند
4
00:00:11,219 –> 00:00:16,980
صحبت خواهم کرد در ویدیوی دیگرم
5
00:00:16,980 –> 00:00:20,100
در مورد فیلتر پایه معادله صحبت کردم، اثبات
6
00:00:20,100 –> 00:00:23,130
اینکه چگونه آنها را بدست آوریم، بنابراین به شما اکیدا
7
00:00:23,130 –> 00:00:25,470
توصیه می کنم که نگاهی بیندازید. در فیلتر پایه،
8
00:00:25,470 –> 00:00:29,220
من این فیلترها را
9
00:00:29,220 –> 00:00:33,809
با پایتون پیاده سازی کرده ام
10
00:00:33,809 –> 00:00:38,730
، بنابراین برای دریافت کد به وب سایت من نگاهی بیندازید تا بتوانیم بینش بهتری
11
00:00:38,730 –> 00:00:41,460
از آن به دست آوریم، بنابراین در ویدیوی اول می
12
00:00:41,460 –> 00:00:43,649
خواهم در مورد فیلتر رایج صحبت کنم
13
00:00:43,649 –> 00:00:47,160
و سپس در دوم و سوم و
14
00:00:47,160 –> 00:00:50,760
چهارم در مورد فیلتر طولانی بدون بو در
15
00:00:50,760 –> 00:00:54,690
فیلتر ذرات، بنابراین بیایید
16
00:00:54,690 –> 00:00:56,309
با آن فیلتر رایج شروع کنیم و همانطور که گفتم
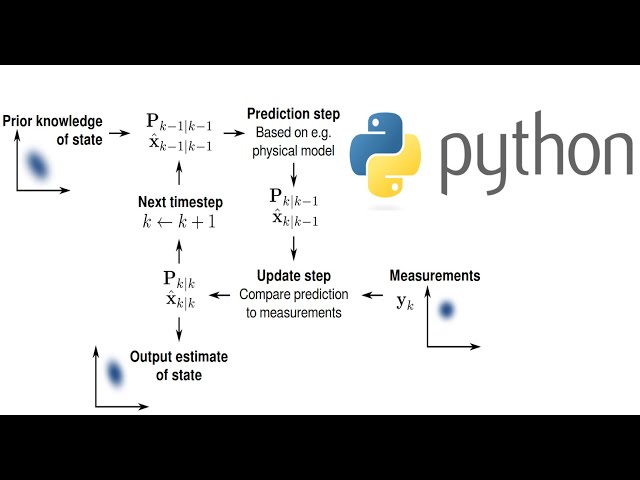
17
00:00:56,309 –> 00:00:58,680
لطفاً به ویدیوی فیلتر پایه نگاهی بیندازید،
18
00:00:58,680 –> 00:01:01,609
جایی که من همه چیز را در آنجا توضیح می دهم،
19
00:01:01,609 –> 00:01:09,540
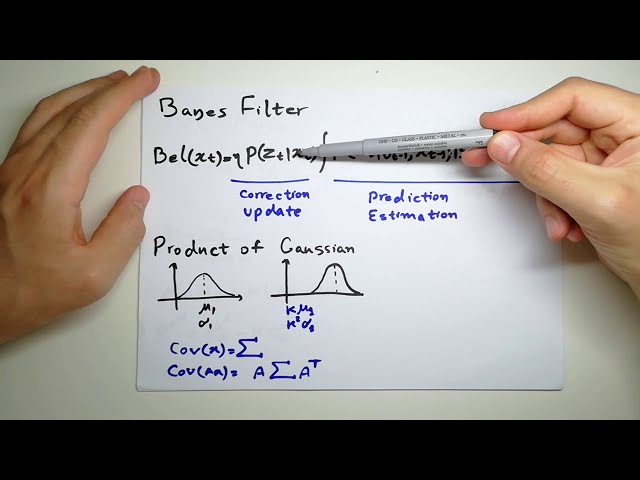
بنابراین فیلتر پایه بیس بال مختصر
20
00:01:09,540 –> 00:01:15,750
فیلتر است. که سعی می کند
21
00:01:15,750 –> 00:01:19,740
وضعیت فعلی ما را بر اساس برخی اندازه گیری ها
22
00:01:19,740 –> 00:01:26,520
و حالت قبلی تخمین بزند، بنابراین ما فرضیه دو ترکیب داده ها را داریم
23
00:01:26,520 –> 00:01:31,670
و بر اساس
24
00:01:31,670 –> 00:01:34,500
اتکای ما به آنها
25
00:01:34,500 –> 00:01:36,210
به نتیجه ای در
26
00:01:36,210 –> 00:01:39,270
مورد واقعی خواهیم رسید. بیان کنید بنابراین ما اندازهگیریهایی
27
00:01:39,270 –> 00:01:44,040
داریم و پیشبینی یا تخمین
28
00:01:44,040 –> 00:01:47,759
داریم، بسیار شهودی است اگر
29
00:01:47,759 –> 00:01:52,350
رباتی را در نظر بگیرید که آن را در جایی قرار دهد، بنابراین
30
00:01:52,350 –> 00:01:53,939
راههای مختلفی وجود دارد که میتوانید به
31
00:01:53,939 –> 00:01:59,000
آنجا برسید، بنابراین نشان میدهیم که با این عبارت
32
00:01:59,000 –> 00:02:01,979
در تمام مکانهایی که
33
00:02:01,979 –> 00:02:05,430
ممکن است بودهایم یکپارچه باشد. عبارت ضرب شده در
34
00:02:05,430 –> 00:02:08,190
احتمال حرکت از آن
35
00:02:08,190 –> 00:02:10,919
حالت خاص با فرمان حرکت
36
00:02:10,919 –> 00:02:13,150
به این حالت، زیرا
37
00:02:13,150 –> 00:02:15,190
ممکن است شما در وضعیتی قرار داشته باشید و
38
00:02:15,190 –> 00:02:18,220
حرکتی را اجرا کرده باشیم، اما ممکن است
39
00:02:18,220 –> 00:02:20,260
به اینجا ختم نشود، می توانید به ویدیوی دیگر من نیز نگاهی بیندازید.
40
00:02:20,260 –> 00:02:23,200
بومی سازی مارکوف
41
00:02:23,200 –> 00:02:26,440
در جایی که مثال خوبی در مورد
42
00:02:26,440 –> 00:02:28,690
محلی سازی ربات با این درهای قرمز و
43
00:02:28,690 –> 00:02:31,209
سبز می
44
00:02:31,209 –> 00:02:33,849
زنم، لینک را نیز در توضیحات قرار دادم
45
00:02:33,849 –> 00:02:37,030
تا قسمت پیش بینی به ما بگوید که آیا
46
00:02:37,030 –> 00:02:41,980
در مرحله خاصی هستیم و اجازه دهید
47
00:02:41,980 –> 00:02:44,440
با دستور حرکت داده شده حرکت کنم.
48
00:02:44,440 –> 00:02:46,780
چه شانسی وجود دارد که ما
49
00:02:46,780 –> 00:02:48,720
واقعاً در وضعیت فعلی قرار
50
00:02:48,720 –> 00:02:51,640
بگیریم و این کار را برای همه وضعیتی که ممکن
51
00:02:51,640 –> 00:02:53,890
است آنجا باشیم انجام می دهیم، بنابراین تخمین پیش بینی
52
00:02:53,890 –> 00:02:57,099
بسیار شهودی است و بعد از اینکه
53
00:02:57,099 –> 00:02:59,049
وارد یک حالت مشخص شدید،
54
00:02:59,049 –> 00:03:00,610
اندازهگیریهایی را انجام میدهید، اندازهگیریها
55
00:03:00,610 –> 00:03:09,370
به این حالت بستگی دارد، بنابراین باید این
56
00:03:09,370 –> 00:03:13,650
دو فرضیه را با هم ترکیب کنیم تا بینش بهتری به دست آوریم
57
00:03:13,650 –> 00:03:17,260
که وضعیت واقعی
58
00:03:17,260 –> 00:03:21,280
XT ما کجاست یا مثلاً ربات کجاست.
59
00:03:21,280 –> 00:03:23,620
و یک پارامتر اضافی در اینجا وجود دارد،
60
00:03:23,620 –> 00:03:26,440
اگر این فقط برای این باشد، یک
61
00:03:26,440 –> 00:03:27,880
نرمال کننده است زیرا این باید یک
62
00:03:27,880 –> 00:03:29,290
احتمال معتبر باشد، ما می توانیم این احتمال را ببینیم
63
00:03:29,290 –> 00:03:32,319
که این یک احتمال نیست، این
64
00:03:32,319 –> 00:03:34,750
قرار است جمع بین همه مقادیر باشد تا
65
00:03:34,750 –> 00:03:38,549
فقط آن را به یک مقدار احتمال مناسب تبدیل کنیم.
66
00:03:38,549 –> 00:03:41,049
به این می گویند پیش بینی یا
67
00:03:41,049 –> 00:03:42,459
تخمین به آن تصحیح یا
68
00:03:42,459 –> 00:03:49,780
به روز رسانی می گویند خوب است بنابراین همانطور که می بینید ما
69
00:03:49,780 –> 00:03:55,560
دو فرضیه داریم و آنها را در اینجا ضرب می
70
00:03:55,560 –> 00:03:58,419
کنیم که از سنسور یا
71
00:03:58,419 –> 00:04:02,859
اندازه گیری می آید و معمولاً در بیشتر
72
00:04:02,859 –> 00:04:04,959
موارد این گاوسی است یا می توانیم فرض کنیم
73
00:04:04,959 –> 00:04:08,500
کسب و کار گاوسی دوست دارد برای مثال اگر
74
00:04:08,500 –> 00:04:11,769
ربات شما به عنوان یک اسکنر رنجر باشد و
75
00:04:11,769 –> 00:04:13,569
بگوید من دو متر با چیزی فاصله دارم،
76
00:04:13,569 –> 00:04:17,488
برای دو متر در این حالت قرار خواهد گرفت
77
00:04:17,488 –> 00:04:20,889
با مقداری عدم قطعیت که ما معمولاً نشان می دهیم.
78
00:04:20,889 –> 00:04:21,380
79
00:04:21,380 –> 00:04:27,050
واریانس h یا کوواریانس و همچنین
80
00:04:27,050 –> 00:04:29,240
پیشبینیهایی که انجام شد مثل اینکه از
81
00:04:29,240 –> 00:04:35,210
قانون دوم حرکت استفاده میکنیم و یک متر حرکت میکنیم،
82
00:04:35,210 –> 00:04:37,910
اما ممکن است در واقع به دلیل
83
00:04:37,910 –> 00:04:40,850
اصطکاک یا زاویه رانش ربات
84
00:04:40,850 –> 00:04:44,270
1 متر 1/2 یا فقط
85
00:04:44,270 –> 00:04:50,860
نیم متر روشن شود. این را می توان
86
00:04:50,860 –> 00:04:53,090
با تعدادی لباس و
87
00:04:53,090 –> 00:04:54,950
توزیع مدل کرد، بنابراین این دوباره
88
00:04:54,950 –> 00:04:56,780
چیزی شبیه به این خواهد بود مانند 1 متر و
89
00:04:56,780 –> 00:04:59,990
مقداری عدم قطعیت، بنابراین ما در واقع داریم
90
00:04:59,990 –> 00:05:03,320
دو گاوسی را ضرب می کنیم و ما
91
00:05:03,320 –> 00:05:06,590
علاقه مندیم که نتیجه
92
00:05:06,590 –> 00:05:08,690
حاصل ضرب حاصل ضرب دو
93
00:05:08,690 –> 00:05:12,020
گاوسی دوباره یک گاوسی دیگر است.
94
00:05:12,020 –> 00:05:17,620
پس میانگین و کوواریانس
95
00:05:17,620 –> 00:05:21,410
گاوس جدید بر اساس این دو حاصلضرب خوب
96
00:05:21,410 –> 00:05:24,710
دو گاوس چیست، می دانیم که اگر
97
00:05:24,710 –> 00:05:27,920
گاوس را در عددی ضرب کنیم میانگین جدید
98
00:05:27,920 –> 00:05:30,500
K برابر بیشتر خواهد شد و ناحیه جدید
99
00:05:30,500 –> 00:05:34,730
K بر 2 خواهد شد و اگر
100
00:05:34,730 –> 00:05:37,310
یک داده N بعدی است، باید
101
00:05:37,310 –> 00:05:40,970
آن را در یک بردار ضرب کنید و کوواریانس جدید
102
00:05:40,970 –> 00:05:44,600
103
00:05:44,600 –> 00:05:50,180
با جابجایی ok مضرب کوواریانس قدیمی خواهد بود، بنابراین
104
00:05:50,180 –> 00:05:53,870
این زمانی است که یک گاوسی را در یک عدد ضرب کنید.
105
00:05:53,870 –> 00:05:57,650
بر یا با a در یک بردار چه
106
00:05:57,650 –> 00:05:59,990
اتفاقی می افتد اگر این دو کد را
107
00:05:59,990 –> 00:06:08,920
در فرضیه شماره یک شماره دو ضرب
108
00:06:08,920 –> 00:06:12,830
کنید میانگین و کوواریانس
109
00:06:12,830 –> 00:06:16,070
چیست و منظور شماست و کوواریانس جدید برای این
110
00:06:16,070 –> 00:06:19,310
محصول چیزی شبیه به این خواهد بود اگر با
111
00:06:19,310 –> 00:06:22,880
دقت نگاه کنید میتوانیم این
112
00:06:22,880 –> 00:06:26,510
داوران را از هر دو بیرون بیاوریم و به این
113
00:06:26,510 –> 00:06:28,840
شکل بنویسیم که به آن
114
00:06:28,840 –> 00:06:30,810
[موسیقی]
115
00:06:30,810 –> 00:06:36,900
میگویند و به ما میگوید بر اساس
116
00:06:36,900 –> 00:06:39,430
عدم قطعیتی که داریم یا
117
00:06:39,430 –> 00:06:42,040
بر اساس اعتمادی که از طرف خود داریم، این
118
00:06:42,040 –> 00:06:44,950
عدد 0 و 1 است که چه میشود.
119
00:06:44,950 –> 00:06:48,490
میانگین و کوواریانس جدید، فرض کنید ما
120
00:06:48,490 –> 00:06:52,990
به فرضیه اول شما اعتماد زیادی داریم، مانند
121
00:06:52,990 –> 00:06:56,290
اینکه شما به مدل یا پیشبینی خود بسیار مطمئن هستید،
122
00:06:56,290 –> 00:07:00,040
به این معنی
123
00:07:00,040 –> 00:07:02,050
که وقتی بسیار کوچک است، بسیار کوچک