در این مطلب، ویدئو درک و کدگذاری یک فیلتر کالمن [بخش 2، پایتون] با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:48:40
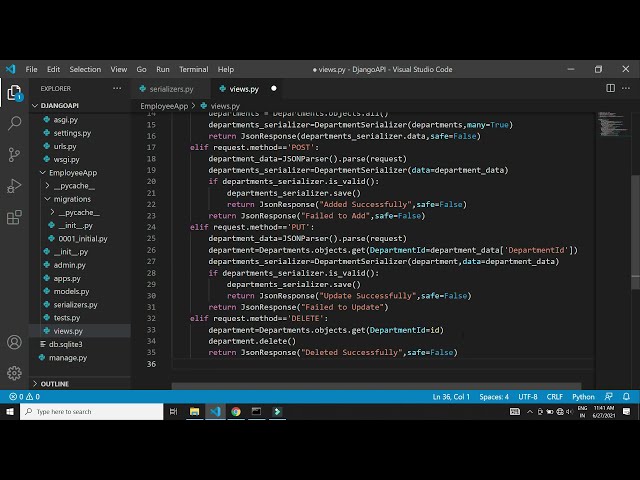
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
00:00:00,290 –> 00:00:04,950
مرحله پیادهسازی فیلتر شتر در
2
00:00:04,950 –> 00:00:09,679
پایتون در اینجا من از یک پوشه خالی شروع کردم،
3
00:00:09,679 –> 00:00:13,559
میتوانید ببینید که شامل
4
00:00:13,559 –> 00:00:15,540
یک پوشه خالی پایتون نیز میشود و این به این
5
00:00:15,540 –> 00:00:17,340
دلیل است که بعداً یک
6
00:00:17,340 –> 00:00:21,900
کد C++ برای پایتون خواهم داشت، بنابراین میخواهم آنها
7
00:00:21,900 –> 00:00:25,680
را از قبل و قبل از آن جدا کنم. با انجام هر کاری که
8
00:00:25,680 –> 00:00:29,330
بخواهم یک پایان مجازی راه اندازی کنم، بنابراین می خواهم
9
00:00:29,330 –> 00:00:35,640
پایتون 3.6 را به آن بدهم، زیرا
10
00:00:35,640 –> 00:00:37,890
این همان چیزی است که می خواهم از آن استفاده کنم،
11
00:00:37,890 –> 00:00:43,320
سپس در نهایت در حال حاضر
12
00:00:43,320 –> 00:00:45,890
محیط مجازی را که می خواهم فعال
13
00:00:45,890 –> 00:00:49,800
کنم، ایجاد خواهم کرد. نصب کنید من سعی می کنم البته
14
00:00:49,800 –> 00:00:57,930
این بهترین است و شاید تست PI
15
00:00:57,930 –> 00:01:03,180
بعداً به آن نیاز داشته باشیم و همچنین آزمایشگاه لوله گذاری شده است
16
00:01:03,180 –> 00:01:08,070
زیرا ما باید پلات کنیم و اوه من
17
00:01:08,070 –> 00:01:15,869
ipython را دوست دارم خوب است بنابراین اکنون این باید
18
00:01:15,869 –> 00:01:24,869
کار کند یاهو بنابراین من می دانم که و همچنین
19
00:01:24,869 –> 00:01:32,579
اینجا من باید numpy داشته باشد، بنابراین
20
00:01:32,579 –> 00:01:36,180
محیط مجازی من اکنون راه اندازی شده است، من می توانم
21
00:01:36,180 –> 00:01:38,610
کدنویسی را شروع کنم، بنابراین از
22
00:01:38,610 –> 00:01:41,430
کد ویژوال استودیو برای این کار استفاده می کنم و
23
00:01:41,430 –> 00:01:43,799
برای شروع یک فایل اصلی نقطه pi ایجاد می
24
00:01:43,799 –> 00:01:46,530
کنم، من با numpy شروع می کنم زیرا من
25
00:01:46,530 –> 00:01:51,930
فکر می کنم اکنون ضروری است
26
00:01:51,930 –> 00:01:54,090
راه های زیادی برای شروع وجود دارد من شروع به
27
00:01:54,090 –> 00:01:55,829
فکر می کنم که ممکن است
28
00:01:55,829 –> 00:01:59,369
کلاس فیلتر کاما برای من حاوی
29
00:01:59,369 –> 00:02:02,369
وضعیت فیلتر
30
00:02:02,369 –> 00:02:04,290
31
00:02:04,290 –> 00:02:06,409
32
00:02:06,409 –> 00:02:09,560
33
00:02:11,370 –> 00:02:15,370
کاما باشد. یا این
34
00:02:15,370 –> 00:02:18,689
کلاس را با دادن موقعیت اولیه به آن
35
00:02:18,689 –> 00:02:23,260
یک تخمین سرعت اولیه از
36
00:02:23,260 –> 00:02:27,760
متغیر حالت من بسازید و سپس
37
00:02:27,760 –> 00:02:38,430
این را مقداردهی اولیه می کنم، بنابراین این میانگین
38
00:02:38,430 –> 00:02:42,670
متغیر تصادفی سوال حالت است
39
00:02:42,670 –> 00:02:44,980
40
00:02:44,980 –> 00:02:50,109
که به جای آن P، خود را در X ذخیره کنید. کوواریانس
41
00:02:50,109 –> 00:02:52,959
این حالت خواهد بود خداییش من هیچ متغیری را اجرا نمی کنم در
42
00:02:52,959 –> 00:02:55,810
این مورد می خواهم خیلی ریاضی
43
00:02:55,810 –> 00:02:57,760
را انجام دهم تا آن را تعریف کنم، فقط
44
00:02:57,760 –> 00:03:01,299
یک ماتریس هویت برای مقداردهی اولیه آن خواهم داشت، این
45
00:03:01,299 –> 00:03:03,849
کاری نیست که من در عمل انجام می دهم. یک
46
00:03:03,849 –> 00:03:05,409
برنامه نهایی زیرا می خواهم
47
00:03:05,409 –> 00:03:07,269
بدانم دقیقاً چه عدم قطعیتی
48
00:03:07,269 –> 00:03:10,180
به سرعت اولیه و
49
00:03:10,180 –> 00:03:13,449
موقعیت اولیه می دهم، اما با توجه به این مورد،
50
00:03:13,449 –> 00:03:17,889
کاری است که برای ساده کردن آن انجام می دهم، اکنون
51
00:03:17,889 –> 00:03:21,750
می توانیم این کلاس را آزمایش کنیم، می توانیم
52
00:03:21,750 –> 00:03:28,199
اینجا K F داشته باشیم. معادله ls KF اولیه x برابر است با 0.2
53
00:03:28,199 –> 00:03:33,310
V اولیه برابر با 0.5 و سپس ببینید
54
00:03:33,310 –> 00:03:35,739
که باید اجرا شود و من دوست دارم این را
55
00:03:35,739 –> 00:03:41,739
از طریق آزمایش ipython اجرا کنم، PI oky
56
00:03:41,739 –> 00:03:47,590
syntax نامعتبر است که منطقی است و اکنون
57
00:03:47,590 –> 00:03:55,120
من این K F XK F را در این مرحله دارم و
58
00:03:55,120 –> 00:03:59,409
در حال سرویس بودم قبلاً می خواهم
59
00:03:59,409 –> 00:04:01,510
چند تست بنویسم تا بتوانم
60
00:04:01,510 –> 00:04:04,359
بفهمم که برای اثبات اینکه
61
00:04:04,359 –> 00:04:06,819
کار را درست انجام می دهم و برای این کار
62
00:04:06,819 –> 00:04:09,819
از تست های PI استفاده خواهم کرد اما
63
00:04:09,819 –> 00:04:12,879
یادم نیست دقیقاً تست ها چگونه هستند.
64
00:04:12,879 –> 00:04:15,690
به این ترتیب
65
00:04:19,668 –> 00:04:27,440
از واحد تست واردات مورد آزمایشی نوشته شده است، من فکر می کنم
66
00:04:29,720 –> 00:04:31,919
خوب است، بنابراین کتابخانه در واقع تست واحد بود،
67
00:04:31,919 –> 00:04:34,740
اما تست PI نیز از چند جهت به ما کمک می کند،
68
00:04:34,740 –> 00:04:38,039
بنابراین ما می توانیم یک
69
00:04:38,039 –> 00:04:42,389
کلاس آزمایشی مانند این داشته باشیم، بنابراین به جای نوشتن
70
00:04:42,389 –> 00:04:44,280
کد من مانند این برای آزمایش آنچه که وجود دارد. ادامه
71
00:04:44,280 –> 00:04:54,570
میدهم، اوکی F را تست میکنم که
72
00:04:54,570 –> 00:05:05,580
با X روی V تست درایو میکنم و میخواهم
73
00:05:05,580 –> 00:05:13,680
بگویم K F برابر است با K F نشان میدهم x برابر است
74
00:05:13,680 –> 00:05:20,449
V برابر است، من x را برابر 0.2 V برابر
75
00:05:20,449 –> 00:05:27,659
هر چیزی قرار میدهم و سپس خودم ادعا میکنم تقریباً
76
00:05:27,659 –> 00:05:34,880
برابر است. چگونه بود به یاد داشته باشید آزمون واحد
77
00:05:34,880 –> 00:05:44,550
ادعا تقریبا مساوی چگونه بود بله
78
00:05:44,550 –> 00:05:47,680
فکر می کنم یک است گواهی تقریباً برابر است
79
00:05:47,680 –> 00:05:53,310
و KF نقطه X 0 باید شبیه X باشد
80
00:05:53,310 –> 00:05:56,470
به جز یک مسئله یا تقریب ممیز شناور
81
00:05:56,470 –> 00:06:01,150
و V باید برابر با V باشد،
82
00:06:01,150 –> 00:06:04,960
بنابراین اکنون برای اجرای این آزمایشها کاری که
83
00:06:04,960 –> 00:06:10,449
میتوانیم انجام دهیم این است که با آزمایش آیتمهای بیننده جمعآوریشده
84
00:06:10,449 –> 00:06:15,039
چیزی اشتباه است. اوه باشه بله
85
00:06:15,039 –> 00:06:18,310
میدونم الان باید فایلی تعریف کنم
86
00:06:18,310 –> 00:06:24,520
که با اون زیرخط شروع میشه پس
87
00:06:24,520 –> 00:06:27,039
اساسا
88
00:06:27,039 –> 00:06:32,220
وقتی من ایجاد میکنم نمیتونید به مقداری refactoring گوش بدید اگر PI
89
00:06:32,220 –> 00:06:43,690
میتونه این رو به اینجا منتقل کنم باید اون رو در یک
90
00:06:43,690 –> 00:06:48,250
فایل جداگانه داشته باشه و main در واقع
91
00:06:48,250 –> 00:06:51,520
حاوی هیچ چیز مطمئنی نخواهد بود، بنابراین تمام کاری که من انجام دادم
92
00:06:51,520 –> 00:06:55,360
تا جابجا شوم و در اینجا کیت تست زمین
93
00:06:55,360 –> 00:07:01,050
در واقع cat را
94
00:07:01,050 –> 00:07:08,800
از KF import ok F import وارد می کند و اکنون ما
95
00:07:08,800 –> 00:07:11,639
به این فیلتر کاما دسترسی داریم و
96
00:07:11,639 –> 00:07:14,500
وقتی تست PI را اجرا می کنم
97
00:07:14,500 –> 00:07:16,810
به دنبال این فایلها بگردید که با تست شروع میشوند
98
00:07:16,810 –> 00:07:19,840
و میتواند این
99
00:07:19,840 –> 00:07:26,770
تست را درست اجرا کند و حالا کینگ کای متوجه شد
100
00:07:26,770 –> 00:07:33,580
که این اشتباه است، البته این هم
101
00:07:33,580 –> 00:07:37,050
درست است، زیرا
102
00:07:40,070 –> 00:07:43,920
بسیار خوب، پس آزمون در حال گذراندن است،
103
00:07:43,920 –> 00:07:46,740
یعنی حداقل X و V هستند.
104
00:07:46,740 –> 00:07:50,250
تاکنون به درستی تکثیر شده است چیزی که ما
105
00:07:50,250 –> 00:07:56,580
نیاز داریم بی فایده است زیرا نمی توانیم
106
00:07:56,580 –> 00:08:00,570
از این چیز زیادی به دست بیاوریم، ممکن است بخواهیم با
107
00:08:00,570 –> 00:08:07,010
داشتن ویژگی در موقعیت های
108
00:08:07,790 –> 00:08:17,310
ناشنوا از بازده X شما شروع کنیم، البته به
109
00:08:17,310 –> 00:08:19,260
این معنی است که کل داستان نیست،
110
00:08:19,260 –> 00:08:20,700
میانگین متغیر تصادفی سوال است،
111
00:08:20,700 –> 00:08:29,460
اما خوب است و ما میتوانیم این کار را انجام دهیم
112
00:08:29,460 –> 00:08:35,039
که آسانتر است و برای آزمایش آن دوباره آزمایش را اجرا میکنیم
113
00:08:35,039 –> 00:08:38,580
بله این یک ویژگی است یا
114
00:08:38,580 –> 00:08:41,909
تابعی مانند استفاده از C++، بنابراین به همین شکل است که
115
00:08:41,909 –> 00:08:46,650
شما به خوبی پیش میروید یک کاری
116
00:08:46,650 –> 00:08:48,810
که من معمولاً در زمانی که دارم انجام میدهم.
117
00:08:48,810 –> 00:08:52,730
کلاس های پایتون برای استفاده از حاشیه نویسی نوع است
118
00:08:52,730 –> 00:08:56,370
زیرا در غیر این صورت مشخص نیست
119
00:08:56,370 –> 00:08:58,950
که چه اتفاقی می افتد
120
00:08:58,950 –> 00:09:01,860
و این یک float را برمی گرداند و
121
00:09:01,860 –> 00:09:04,650
اگر همه چیز خوب باشد باید به
122
00:09:04,650 –> 00:09:06,960
خوبی کامپایل شود و می بینید که
123
00:09:06,960 –> 00:09:08,880
دیدن اولیه Ok بسیار آسان تر است. X
124
00:09:08,880 –> 00:09:10,350
یک ماتریس نیست یک شناور است، بلکه باید یک
125
00:09:10,350 –> 00:09:13,050
شناور باشد و هیچ چیز دیگری نیز نیست و
126
00:09:13,050 –> 00:09:16,520
خواندن کد بعد از
127
00:09:16,520 –> 00:09:21,360
آن را بسیار ساده می کند، بسیار خوب و بیهوده زیرا
128
00:09:21,360 –> 00:09:26,220
این اما هنوز هم بسیار بی فایده است، اجازه دهید
129
00:09:26,220 –> 00:09:29,070
شروع به تغییر چند چیز یا بهبود آن کنیم.
130
00:09:29,070 –> 00:09:31,770
کلاس است، بنابراین گفتیم که یکی از
131
00:09:31,770 –> 00:09:35,790
کارهایی که باید انجام دهیم این است که با
132
00:09:35,790 –> 00:09:38,130
133
00:09:38,130 –> 00:09:41,430
گذشت زمان از یک مرحله به مرحله دیگر، متغیری را برای تکامل زمانی بحث اجرا کنیم
134
00:09:41,430 –> 00:09:44,160
و برای آن
135
00:09:44,160 –> 00:09:45,940
این روش پیش بینی را بنویسیم
136
00:09:45,940 –> 00:09:48,940
و برای پیشبینی کنید که باید
137
00:09:48,940 –> 00:09:51,640
دلتا T را بشناسیم زیرا باید بدانیم
138
00:09:51,640 –> 00:09:53,950
چقدر زمان
139
00:09:53,950 –> 00:09:56,290
بین آخرین مرحله و مرحله فعلی گذشته است
140
00:09:56,290 –> 00:10:00,730
و فکر میکنم این چیزی نیست
141
00:10:00,730 –> 00:10:04,330
و چیزی برنمیگرداند زیرا
142
00:10:04,330 –> 00:10:06,040
اساساً حالت را تغییر میدهد.
143
00:10:06,040 –> 00:10:10,260
با توجه به پیشبینی اضافهوقت
144
00:10:10,260 –> 00:10:13,240
از معادلات دورهای که داشتیم
145
00:10:13,240 –> 00:10:19,480
که x جدید برابر s
146
00:10:19,480 –> 00:10:24,540
ضرب در x قدیمی و p جدید برابر است با f p f
147
00:10:24,540 –> 00:10:31,320
انتقال به اضافه G بنابراین G بار جابجا شده بسیار
148
00:10:31,320 –> 00:10:40,390
خوب من اینجا بارها را ساده میکردم، بنابراین
149
00:10:40,390 –> 00:10:44,680
در واقع شاید میخواهیم خوب ما
150
00:10:44,680 –> 00:10:47,650
به یک نیاز داریم، بنابراین کاری که من انجام می دهم این است که اینجا
151
00:10:47,650 –> 00:10:57,100
یک شناور اضافه کنم و من دعا می کنم
152
00:10:57,100 –> 00:11:00,460
واریانس شتاب شناور و آن را در اینجا
153
00:11:00,460 –> 00:11:06,910
می دزدم، از اینجا شروع می کنم دوستان دندانه ای من
154
00:11:06,910 –> 00:11:08,740
می خواهم از این مزیت استفاده کنم و این را جایگزین کنم
155
00:11:08,740 –> 00:11:12,550
تا یک PR باشد. متغیر ivate و سپس می
156
00:11:12,550 –> 00:11:17,620
توانید اینجا را ببینید من هم می توانم این کار را انجام دهم
157
00:11:17,620 –> 00:11:21,210
جالب اینجاست که از نحوه
158
00:11:21,210 –> 00:11:26,080
نوشتن تست این است که در حال حاضر
159
00:11:26,080 –> 00:11:28,690
تست به من نشان می دهد که آیا من به نوعی خراب شده ام
160
00:11:28,690 –> 00:11:30,640
و البته یک تست متوجه خواهد شد
161
00:11:30,640 –> 00:11:32,170
که من یک
162
00:11:32,170 –> 00:11:34,690
واریانس همکاری را پاس نکردهام، اما اگر
163
00:11:34,690 –> 00:11:38,230
فراموش کنم نام متغیر عضو X را در اینجا تغییر نام بدهم، میگیرد،
164
00:11:38,230 –> 00:11:40,750
بنابراین ابتدا این کار را انجام میدهیم که
165
00:11:40,750 –> 00:11:44,230
بگوییم خوب شتاب واریانس
166
00:11:44,230 –> 00:11:47,260
برابر است مثلاً 1.2 فقط برای بریدن آرگومان
167
00:11:47,260 –> 00:11:49,480
از آن. تست را انجام دهیم و اکنون می توانیم دوباره اجرا
168
00:11:49,480 –> 00:11:51,340
کنیم و آن را با موفقیت پشت سر بگذاریم، بنابراین به نظر من
169
00:11:51,340 –> 00:11:52,900
حداقل می توانیم شی
170
00:11:52,900 –> 00:11:56,110
را بسازیم و همان کاری را که می خواستیم انجام می دهیم در حال حاضر همه چیز را انجام می
171
00:11:56,110 –> 00:11:58,150
دهد.
172
00:11:58,150 –> 00:12:01,720
در اینجا بنویسید ما
173
00:12:01,720 –> 00:12:03,580
باید معادله بیت را بنویسیم بنابراین
174
00:12:03,580 –> 00:12:09,130
باید انجام دهیم که x جدید برابر با F
175
00:12:09,130 –> 00:12:14,860
ضرب در X F قدیمی است همانطور که در
176
00:12:14,860 –> 00:12:21,780
قسمت قبلی ویدیو گفتیم 1 DT 0
177
00:12:21,780 –> 00:12:35,110
1 است و mu P می شود F باشه.
178
00:12:35,110 –> 00:12:38,290
در عدد پی در numpy کار نمی کند زیرا
179
00:12:38,290 –> 00:12:39,760
سعی می شود ضرب عنصر به عنصر
180
00:12:39,760 –> 00:12:42,760
یا Broadcastin انجام شود g اگر
181
00:12:42,760 –> 00:12:45,660
میخواهید بردار یا محصولات ماتریس را ماتریس
182
00:12:45,660 –> 00:12:49,960
کنید، باید این کار را انجام دهید که
183
00:12:49,960 –> 00:12:51,430
خیلی زیبا نیست، اما این روشی است
184
00:12:51,430 –> 00:12:53,560
که در داور کار میکند، بنابراین
185
00:12:53,560 –> 00:12:56,110
محصول ماتریس مناسب را انجام میدهیم و در
186
00:12:56,110 –> 00:12:59,940
اینجا همان f نقطه P نقطه است. F
187
00:12:59,940 –> 00:13:05,850
انتقال داده شده به اضافه شما G نقطه
188
00:13:05,850 –> 00:13:11,920
انتقال داده شده است G ضربدر واریانس خود شتاب،
189
00:13:11,920 –> 00:13:17,560
بنابراین اکنون باید اینجا بنویسیم F
190
00:13:17,560 –> 00:13:22,570
ما آن را داریم G ما هنوز آن را نداریم، بنابراین
191
00:13:22,570 –> 00:13:27,870
G آرایه MP است و گفتیم که 0.5
192
00:13:27,870 –> 00:13:35,140
ضرب در مجذور DT و DT است. در غیر
193
00:13:35,140 –> 00:13:40,200
این صورت، باید اندازه آن را به اندازه 2 در 1
194
00:13:40,200 –> 00:13:42,970
در بیاورم، در صورتی که اینطور نیست، زیرا من نمی دانم
195
00:13:42,970 –> 00:13:45,960
زمانی که من این کار را خوب می دهم، Numpy چه کاری انجام می دهد،
196
00:13:45,960 –> 00:13:54,160
بنابراین باید کار کند و
197
00:13:54,160 –> 00:13:55,810
اولین کاری که من انجام خواهم داد، یعنی من نیستم در حال
198
00:13:55,810 –> 00:13:57,370
بهروزرسانی متغیرها هستم، اما من فقط سعی میکنم
199
00:13:57,370 –> 00:13:59,170
این کد را اجرا کنم زیرا در پایتون از آنجایی که ما
200
00:13:59,170 –> 00:14:01,450
کامپایل نمیکنیم چه کسی میداند، بنابراین من
201
00:14:01,450 –> 00:14:05,320
به سراغ تست میروم زیرا تست تنفس تعریف
202
00:14:05,320 –> 00:14:08,680
میتواند پیشبینی کند بسیار خوب، توضیح بیشتری
203
00:14:08,680 –> 00:14:11,740
در مورد تست نمیدهم. از این به بعد
204
00:14:11,740 –> 00:14:14,560
من همان فیلتر مشترک را ایجاد می
205
00:14:14,560 –> 00:14:17,199
کنم و می خواهم با یک فیلتر پیش بینی GT را
206
00:14:17,199 –> 00:14:19,990
صدا کنم. فقط به این دلیل که آن را
207
00:14:19,990 –> 00:14:24,399
اساساً خوب اجرا کند، شما آن را دارید،
208
00:14:24,399 –> 00:14:27,069
البته برخی از مسائل وجود دارد، بنابراین P
209
00:14:27,069 –> 00:14:30,339
تعریف نشده است، زیرا من فراموش کردم که خودم بنویسم
210
00:14:30,339 –> 00:14:37,720
که P و باید همه چیز را درست انجام دهد
211
00:14:37,720 –> 00:14:43,660
، بنابراین حداقل که تا اینجا اجرا شده است،
212
00:14:43,660 –> 00:14:49,649
اکنون می توانیم بگوییم خود این که P برابر است با چیزهای جدید P
213
00:14:49,649 –> 00:14:55,509
که x برابر است با X جدید و
214
00:14:55,509 –> 00:14:59,230
همچنین باید کار کند بله و اکنون آخرین
215
00:14:59,230 –> 00:15:04,569
چیزی که می خواهم این تست را امتحان
216
00:15:04,569 –> 00:15:10,569
کنم که بعد از فراخوانی پیش بینی X و P
217
00:15:10,569 –> 00:15:15,130
شکل درستی دارند زیرا ممکن است
218
00:15:15,130 –> 00:15:19,449
من بهم ریخته باشم ابعاد من
219
00:15:19,449 –> 00:15:21,100
زمانی که ضرب ماتریس را انجام میدادم، بنابراین
220
00:15:21,100 –> 00:15:25,300
میتوانم بروم KS پیشبینی کنم خوب X و P خصوصی هستند،
221
00:15:25,300 –> 00:15:27,010
بنابراین کاری که میخواهم انجام دهم، بنابراین
222
00:15:27,010 –> 00:15:31,470
در اینجا برخی از ویژگیها را تعریف
223
00:15:37,720 –> 00:15:41,060
میکنم، فقط نمیدانم چگونه صدا کنم این
224
00:15:41,060 –> 00:15:44,000
اما پس از آن ممکن است منطقی باشد
225
00:15:44,000 –> 00:16:01,279
که P را برگرداند تا من بتوانم آن را انجام دهیم تا بتوانیم
226
00:16:01,279 –> 00:16:08,029
K F نقطه کوواریانس
227
00:16:08,029 –> 00:16:14,390
برابر را ثابت کنیم و شکل کوواریانس کوواریانس برابر با
228
00:16:14,390 –> 00:16:22,459
دو باشد.
229
00:16:22,459 –> 00:16:27,080
230
00:16:27,080 –> 00:16:33,440
می توانم انتظار داشته باشم که من
231
00:16:33,440 –> 00:16:36,940
نمی دانم این به چه چیزی ختم می شود
232
00:16:36,940 –> 00:16:40,459
احتمالاً بله نیست زیرا فقط یک
233
00:16:40,459 –> 00:16:43,520
بردار است و فقط یک بعد وجود ندارد،
234
00:16:43,520 –> 00:16:46,970
بنابراین بیایید بنویسیم
235
00:16:46,970 –> 00:16:50,600
که خوب است، بنابراین این یک تست مهم است.
236
00:16:50,600 –> 00:16:56,860
فکر می کنم اکنون چیز دیگر این است که
237
00:16:56,860 –> 00:16:59,120
فکر می کنم ممکن است بخواهیم این را با دقت بیشتری آزمایش کنیم،
238
00:16:59,120 –> 00:17:03,230
چه بعد از فراخوانی پیشبینی
239
00:17:03,230 –> 00:17:05,059
عدم قطعیت افزایش مییابد زیرا زمانی
240
00:17:05,059 –> 00:17:11,510
که پیشبینی را اجرا میکنیم، در حال
241
00:17:11,510 –> 00:17:16,459
ادغام هستیم و اگر اندازهگیریهای کاملی داشتیم،
242
00:17:16,459 –> 00:17:20,059
تخمینهای کامل
243
00:17:20,059 –> 00:17:21,920
بر حسب زوج را داشتیم، اساساً اگر این
244
00:17:21,920 –> 00:17:24,439
ماتریس کوواریانس همه صفر بود،
245
00:17:24,439 –> 00:17:27,140
آنگاه دانش کاملی از وضعیت خود خواهیم داشت
246
00:17:27,140 –> 00:17:29,390
و انتشار در طول زمان به ما خواهد
247
00:17:29,390 –> 00:17:33,260
داد. عدم قطعیت ما افزایش نمی یابد،
248
00:17:33,260 –> 00:17:36,710
اما چون ما در طول
249
00:17:36,710 –> 00:17:39,700
زمان در حال ادغام هستیم و در حال ادغام بر روی
250
00:17:39,700 –> 00:17:43,390
مقادیر نامطمئن نامشخص هستیم، پس
251
00:17:43,390 –> 00:17:45,800
اطمینان خود را هر چه پیش می رویم افزایش می دهیم، بنابراین
252
00:17:45,800 –> 00:17:46,640
شما
253
00:17:46,640 –> 00:17:49,820
پیش بینی کرده اید پس باید دائماً
254
00:17:49,820 –> 00:17:52,610
اطمینان خود را از تخمین وضعیت خود افزایش دهیم
255
00:17:52,610 –> 00:17:55,580
همانطور که ما داریم
256
00:17:55,580 –> 00:18:00,550
از پیشبینی به پیشبینی دیگر عبور کنید و
257
00:18:02,050 –> 00:18:05,150
کاری که من انجام خواهم داد این است که فراخوانی پیشبینی
258
00:18:05,150 –> 00:18:11,780
عدم قطعیت حالت را افزایش میدهد. چگونه می
259
00:18:11,780 –> 00:18:15,920
خواهیم این را اندازه گیری کنیم، بنابراین ابتدا
260
00:18:15,920 –> 00:18:22,070
می خواهم 10 بار پیش بینی کنم
261
00:18:22,070 –> 00:18:24,950
و این این است که هر بار که
262
00:18:24,950 –> 00:18:26,570
پیش بینی می کنم تخمین عدم قطعیت من باید
263
00:18:26,570 –> 00:18:28,720
افزایش یابد، اکنون اطمینان از
264
00:18:28,720 –> 00:18:32,060
متغیر تصادفی گاوسی با دقت بیشتری
265
00:18:32,060 –> 00:18:36,740
دیفرانسیل آنتروپی وجود دارد. آنتروپی
266
00:18:36,740 –> 00:18:39,020
تعیین کننده آن ماتریس است، بنابراین
267
00:18:39,020 –> 00:18:42,170
آنچه ما انتظار داریم این است که
268
00:18:42,170 –> 00:18:45,500
269
00:18:45,500 –> 00:18:54,080
هر زمان که ما پیش بینی می کنیم، تعیین کننده ماتریس کوواریانس باید افزایش یابد و کاری که می
270
00:18:54,080 –> 00:18:59,900
خواهیم انجام دهیم این است، بنابراین ما
271
00:18:59,900 –> 00:19:03,260
پایانه را قبل و بعد اندازه گیری می کنیم و
272
00:19:03,260 –> 00:19:07,190
ادعا می کنیم بیشتر است. یک تعیین کننده بعد
273
00:19:07,190 –> 00:19:10,930
از ترمینال قبل از آن باید درست باشد
274
00:19:10,930 –> 00:19:14,390
و من هرگز این کار را قبلا انجام ندادم وقتی سعی کردم
275
00:19:14,390 –> 00:19:20,230
که حالا خوب فراموش
276
00:19:24,520 –> 00:19:27,440
کردم که numpy oky determinant چنین چیزی نیست.
277
00:19:27,440 –> 00:19:30,580
278
00:19:31,470 –> 00:19:36,539
279
00:19:36,539 –> 00:19:39,360
شما می توانید این کار را انجام دهید،
280
00:19:39,360 –> 00:19:45,480
بنابراین می توانم بشنوم که قبل از چاپ انجام شده است،
281
00:19:45,480 –> 00:19:50,460
بعد از آن می بینید که اکنون متأسفم اکنون
282
00:19:50,460 –> 00:19:52,409
چیزی چاپ نمی کند زیرا تست PI
283
00:19:52,409 –> 00:19:56,129
یک سی دی را بیرون می آورد و آن را به مدت طولانی می خورد
284
00:19:56,129 –> 00:19:58,799
، اما اگر این کار را انجام دهیم. منهای s سپس تست PI
285
00:19:58,799 –> 00:20:01,169
شهر را به ما نشان می دهد و در آنجا
286
00:20:01,169 –> 00:20:02,639
این چیزی است که می بینید، بنابراین می توانید ببینید
287
00:20:02,639 –> 00:20:06,690
که قبل از بعد و قبل از آن به این صورت است
288
00:20:06,690 –> 00:20:08,100
و می توانید ببینید که عدم قطعیت در
289
00:20:08,100 –> 00:20:10,289
حال افزایش است و
290
00:20:10,289 –> 00:20:12,419
تا زمانی که اندازه گیری نداشته باشیم، اساساً نامحدود است.
291
00:20:12,419 –> 00:20:13,679
که می تواند عدم قطعیت ما را محدود
292
00:20:13,679 –> 00:20:17,519
کند، خوب است، بنابراین من می گویم
293
00:20:17,519 –> 00:20:20,279
که این برای موفقیت است، اگر بخواهم
294
00:20:20,279 –> 00:20:21,629
این را در واقعیت پیاده کنم،
295
00:20:21,629 –> 00:20:23,700
در یک محصول واقعی نیز خوب عمل می کنم و
296
00:20:23,700 –> 00:20:26,279
همچنین مطمئن می شوم که با توجه به
297
00:20:26,279 –> 00:20:27,779
پارامترهای فیلتر دوربین در حالت اولیه
298
00:20:27,779 –> 00:20:33,899
خروجی تخمین کوواریانس و
299
00:20:33,899 –> 00:20:36,899
میانگین آن چیزی است که من انتظار دارم و
300
00:20:36,899 –> 00:20:38,340
این بدان معنی است که یک آزمون عددی وجود دارد که در
301
00:20:38,340 –> 00:20:41,490
آن مقایسه می کنم که
302
00:20:41,490 –> 00:20:44,429
حالت قبل و بعد این است و
303
00:20:44,429 –> 00:20:46,320
با ماتریس کوواریانس یکسان است، اما در اینجا
304
00:20:46,320 –> 00:20:51,799
برای سادگی از آن می گذرم. بنابراین
305
00:20:51,799 –> 00:20:54,570
تا کنون ما این مورد آزمایشی را داریم که
306
00:20:54,570 –> 00:20:59,100
به ما نشان میدهد خوب بله،
307
00:20:59,100 –> 00:21:01,200
چیزهای اساسی کار میکنند زمانی که من میخواهم این کار را انجام دهم،
308
00:21:01,200 –> 00:21:04,740
این همان کاری است که اکنون انجام میدهم این است
309
00:21:04,740 –> 00:21:09,120
که بعد از تماس اساساً میخواهم آن را آزمایش کنم.
310
00:21:09,120 –> 00:21:10,769
در غیر این صورت چه اتفاقی در حال رخ دادن است زیرا این
311
00:21:10,769 –> 00:21:12,120
به من درک بهتری میدهد
312
00:21:12,120 –> 00:21:14,059
که آیا کار را درست انجام میدهم یا نه،
313
00:21:14,059 –> 00:21:18,350
بنابراین کاری که در اینجا انجام
314
00:21:30,460 –> 00:21:38,859
میدهم در پورت از غار است، خوب است و میخواهم
315
00:21:38,859 –> 00:21:39,979
mm-
316
00:21:39,979 –> 00:21:43,960
hmm چگونه داستان فرعی است. خروجی زنده
317
00:21:49,929 –> 00:21:52,479
در واقع فکر میکنم به یاد دارم
318
00:21:52,479 –> 00:22:02,559
بنابراین ردیفها، ستونها، بله شما یکی را میخواهید،
319
00:22:03,849 –> 00:22:06,200
بنابراین کاری که من انجام میدهم این است که ابتدا با
320
00:22:06,200 –> 00:22:10,070
یک فیلتر کاما شروع میکنم، بگذارید بگوییم که X اولیه
321
00:22:10,070 –> 00:22:14,149
صفر است، نقطه صفر اولیه یک اینچ LV اشکالی
322
00:22:14,149 –> 00:22:16,099
ندارد، اجازه دهید در حال حرکت باشد
323
00:22:16,099 –> 00:22:19,419
جهت x مثبت و
324
00:22:19,419 –> 00:22:23,539
واریانس شتاب خوب
325
00:22:23,539 –> 00:22:26,749
است، در این مرحله واقعاً مهم نیست، بگذارید 0.1 را کاملاً قرار دهیم،
326
00:22:26,749 –> 00:22:29,450
بنابراین اکنون میخواهیم قدم بگذاریم، ما
327
00:22:29,450 –> 00:22:33,849
دلتا t نیستیم، فرض کنید 0.1 ثانیه با
328
00:22:33,849 –> 00:22:39,799
حروف بزرگ است زیرا یک گام ثابت نام
329
00:22:39,799 –> 00:22:45,399
و هزار بیایید بگوییم و حالا
330
00:22:53,730 –> 00:22:58,049
چگونه این کار را انجام
331
00:22:58,990 –> 00:23:08,409
دهم، گفتم که این کار ادامه دارد، بنابراین من میخواهم
332
00:23:08,409 –> 00:23:10,419
کوواریانس
333
00:23:10,419 –> 00:23:14,830
و میانگین توزیع آنها را در آنجا ذخیره کنم،
334
00:23:14,830 –> 00:23:22,830
همانطور که من هر کدام را برای I در گامهای محدوده
335
00:23:23,909 –> 00:23:35,909
F به بالا ذخیره میکنم. و به سمت بالا حرکت می کنم و
336
00:23:37,289 –> 00:23:46,889
سپس یک مرحله پیش بینی DT انجام می دهم، بنابراین
337
00:23:49,559 –> 00:23:55,860
من می خواهم آن را o
338
00:23:55,860 –> 00:24:00,000
فعلاً متوقف خواهد شد، احتمالاً زیاد رسم نمیشود، اما
339
00:24:00,000 –> 00:24:02,440
بسیار عالی است، این همان چیزی است که من میخواهم اگر
340
00:24:02,440 –> 00:24:03,570
روی آن کلیک کنم خوب خارج میشود،
341
00:24:03,570 –> 00:24:10,649
اکنون کاری که میخواهم انجام دهم این است که
342
00:24:11,100 –> 00:24:14,049
موقعیت را انجام دهم و سپس میخواهم همان کار را انجام دهم
343
00:24:14,049 –> 00:24:19,889
اما سرعت و در اینجا من میخواهید
344
00:24:19,889 –> 00:24:38,880
بهخوبی طرحریزی کنید، اجازه دهید فقط مراحل را ترسیم کنیم و از
345
00:24:38,880 –> 00:24:52,600
گاو برای Moo به زبان برمهای استفاده کنیم، خوب است،
346
00:24:52,600 –> 00:24:54,279
بنابراین این موقعیت است و میتوانید ببینید که
347
00:24:54,279 –> 00:24:57,549
منطقی است که در حال افزایش است
348
00:24:57,549 –> 00:24:59,529
زیرا سرعتی را که در ابتد