در این مطلب، ویدئو آموزش Webbots 3: کد کنترلر برای هدایت ربات درایو دیفرانسیل // Webbots Tutorial Python با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:12:58
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00:00:00,799 –> 00:00:02,720
سلام به همه، نام من کژال است و
2
00:00:02,720 –> 00:00:04,480
به ویدیوی دیگری در سری آموزش vbots خوش آمدید،
3
00:00:04,480 –> 00:00:06,560
4
00:00:06,560 –> 00:00:08,639
هفته گذشته یاد گرفتیم که چگونه
5
00:00:08,639 –> 00:00:11,200
6
00:00:11,200 –> 00:00:11,840
ربات دیفرانسیل دو چرخ سفارشی خود را
7
00:00:11,840 –> 00:00:14,719
در vbots بسازیم، این هفته یاد می گیریم که چگونه
8
00:00:14,719 –> 00:00:16,400
یک کد کنترلر بنویسیم
9
00:00:16,400 –> 00:00:18,800
تا شما را هدایت کنید. ربات در اطراف و برای اینکه
10
00:00:18,800 –> 00:00:19,520
آن را به یک پروژه جالب سرگرم کننده تبدیل
11
00:00:19,520 –> 00:00:21,119
کنیم، ما می خواهیم
12
00:00:21,119 –> 00:00:23,279
یاد بگیریم که چگونه یک ربات را
13
00:00:23,279 –> 00:00:25,920
به شکل مربع یا هر چند ضلعی رانندگی کنیم،
14
00:00:25,920 –> 00:00:26,640
15
00:00:26,640 –> 00:00:28,640
اگر از این سری آموزش وب بات لذت می برید
16
00:00:28,640 –> 00:00:30,720
، حتماً مشترک شوید
17
00:00:30,720 –> 00:00:32,800
و اعلان زنگ را بزنید تا
18
00:00:32,800 –> 00:00:34,640
بدانید هر بار که یک
19
00:00:34,640 –> 00:00:35,360
آموزش جدید میآورم،
20
00:00:35,360 –> 00:00:45,840
بنابراین بدون هیچ مقدمهای بیایید وارد آن
21
00:00:46,210 –> 00:00:49,360
[Music] شویم،
22
00:00:49,360 –> 00:00:52,000
بنابراین به جادوگران بروید و روی new robot
23
00:00:52,000 –> 00:00:54,239
controller
24
00:00:54,239 –> 00:00:56,399
continue کلیک کنید و من میخواهم
25
00:00:56,399 –> 00:00:59,199
کدم را در پایتون بنویسم، بنابراین پایتون را ادامه میدهم.
26
00:00:59,199 –> 00:01:05,920
بیایید آن را درایو ربات من بنامیم
27
00:01:09,119 –> 00:01:12,159
روی ادامه کلیک کنید و
28
00:01:12,159 –> 00:01:15,439
با انجام این کار، کد را در ویرایشگر شما باز می کنیم در
29
00:01:15,439 –> 00:01:18,479
اینجا اکنون با
30
00:01:18,479 –> 00:01:20,560
تنظیمات اولیه ارائه می شود که بسیار عالی است زیرا
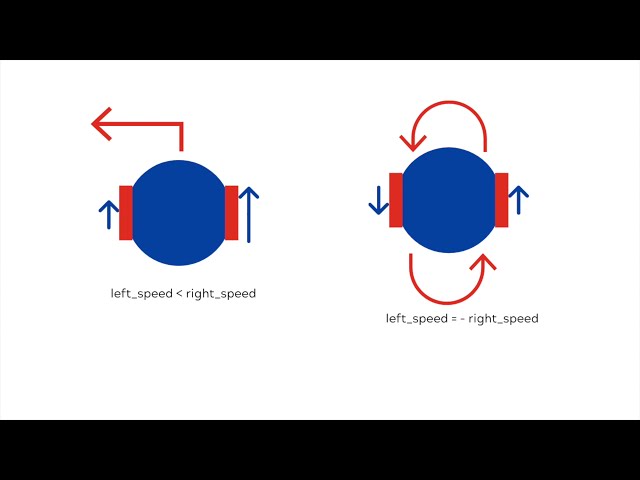
31
00:01:20,560 –> 00:01:22,799
به شما کمک می کند برخی از موارد
32
00:01:22,799 –> 00:01:24,560
موجود در پایتون را که فقط می توانید برایتان بنویسید به خاطر بسپارید.
33
00:01:24,560 –> 00:01:26,479
لزوماً نیازی به نوشتن یک کد اصلی ندارید،
34
00:01:26,479 –> 00:01:28,720
اما من ترجیح میدهم این کار را انجام دهم، بنابراین اجازه
35
00:01:28,720 –> 00:01:31,680
دهید یک کد اصلی اضافه کنیم
36
00:01:35,840 –> 00:01:40,079
و من میخواهم زبانه خوب کدم را تورفتگی کنم،
37
00:01:40,079 –> 00:01:43,600
بنابراین اولین کاری که انجام میدهید این
38
00:01:43,600 –> 00:01:45,680
است که یک نمونه از ربات خود بسازید
39
00:01:45,680 –> 00:01:46,720
که به سادگی
40
00:01:46,720 –> 00:01:51,680
ربات است. بعدی یک مهر زمانی است
41
00:01:51,680 –> 00:01:54,960
که ما به سادگی از 64 استفاده می کنیم. در
42
00:01:54,960 –> 00:01:57,600
مرحله بعدی همانطور که در اینجا ذکر شد باید
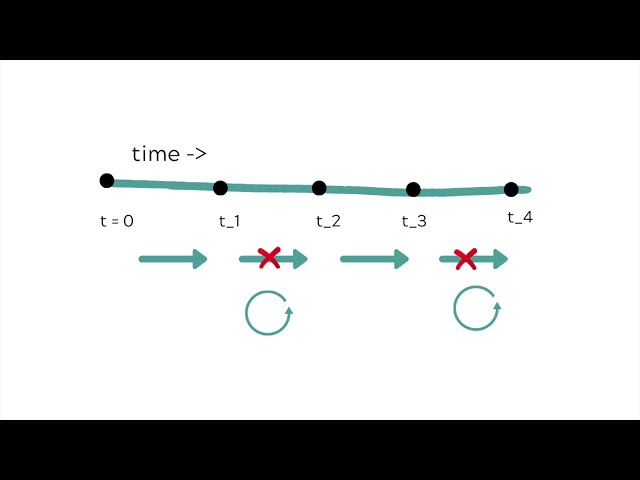
43
00:01:57,600 –> 00:01:58,159
44
00:01:58,159 –> 00:02:01,520
یک شی برای موتورهای خود ایجاد کنید،
45
00:02:01,520 –> 00:02:05,680
بنابراین بیایید یک ربات موتور سمت چپ داشته باشیم که موتور را
46
00:02:05,920 –> 00:02:08,959
دریافت
47
00:02:08,959 –> 00:02:11,520
کند
48
00:02:12,879 –> 00:02:15,280
و سپس می توانیم نام خود را
49
00:02:15,280 –> 00:02:17,280
در اینجا
50
00:02:17,280 –> 00:02:21,360
زیر چرخش دستگاه مفصل لولای کودکان بررسی کنیم.
51
00:02:21,360 –> 00:02:23,920
موتور و می توانید ببینید
52
00:02:23,920 –> 00:02:24,560
که
53
00:02:24,560 –> 00:02:28,080
ما موتور خود را یک نام گذاری کرده ایم،
54
00:02:34,080 –> 00:02:38,560
بیایید همین کار را برای موتور دوم خود
55
00:02:47,519 –> 00:02:50,000
انجام دهیم، سپس موقعیت
56
00:02:50,000 –> 00:02:50,800
موتور خود را روی
57
00:02:50,800 –> 00:03:05,840
بی نهایت قرار دهیم و سرعت را روی صفر قرار
58
00:03:48,159 –> 00:03:50,239
دهیم، اجازه دهید یک نظر کوچک از کاری که انجام می دهیم اضافه کنیم
59
00:03:50,239 –> 00:03:52,239
و پاکسازی کنیم. بقیه نظراتی
60
00:03:52,239 –> 00:03:55,040
که ما نیازی به آنها
61
00:03:58,239 –> 00:04:00,400
نداریم در ادامه وارد حلقه اصلی خود می شویم همانطور
62
00:04:00,400 –> 00:04:02,319
که در اینجا ذکر شد این کاری است که ربات
63
00:04:02,319 –> 00:04:03,120
شما برای
64
00:04:03,120 –> 00:04:06,319
هر مرحله از شبیه سازی شما انجام می دهد. این
65
00:04:06,319 –> 00:04:07,280
مکانی عالی برای
66
00:04:07,280 –> 00:04:10,400
خواندن مقادیر حسگر شما و پردازش آنها و
67
00:04:10,400 –> 00:04:12,480
تصمیم گیری است
68
00:04:12,480 –> 00:04:14,720
که معمولا شرکت بده به محرکهای شما
69
00:04:14,720 –> 00:04:15,599
70
00:04:15,599 –> 00:04:18,238
مانند یک موتور یا با تنظیم موقعیت
71
00:04:18,238 –> 00:04:20,160
یا با دادن سرعت
72
00:04:20,160 –> 00:04:24,560
در مورد ما به سادگی سرعت میدهیم،
73
00:04:24,560 –> 00:04:28,400
بنابراین بیایید این را تمیز کنیم زیرا
74
00:04:28,400 –> 00:04:30,400
سرعت را میدهیم، بیایید حداکثر سرعت را تعیین کنیم
75
00:04:30,400 –> 00:04:33,280
76
00:04:36,800 –> 00:04:43,840
که 6.28 است،
77
00:04:46,479 –> 00:04:48,880
اجازه دهید دو سرعت برای سمت چپ داشته باشیم. و
78
00:04:48,880 –> 00:04:50,080
موتور سمت راست
79
00:04:50,080 –> 00:04:57,840
فعلا بیایید با نیم سرعت کار
80
00:05:08,639 –> 00:05:13,360
کنیم بعد سرعت را روی این
81
00:05:22,840 –> 00:05:25,840
سرعت ها
82
00:05:36,840 –> 00:05:39,840
خارجی قرار می
83
00:05:40,720 –> 00:05:44,080
دهیم و ذخیره را
84
00:05:45,680 –> 00:05:49,360
می زنیم حالا وارد ربات خود می شویم
85
00:05:49,360 –> 00:05:52,160
و در زیر کنترلر کدی را
86
00:05:52,160 –> 00:05:54,720
که نوشتیم
87
00:05:54,720 –> 00:05:58,319
درایو ربات من انتخاب
88
00:06:03,360 –> 00:06:05,840
می کنیم و به آنجا می رویم ربات ما در حال رانندگی
89
00:06:05,840 –> 00:06:08,319
مستقیم
90
00:06:09,120 –> 00:06:11,840
برای ربات دیفرانسیل درایو است،
91
00:06:11,840 –> 00:06:12,800
دو راه برای
92
00:06:12,800 –> 00:06:15,919
چرخاندن ربات وجود دارد یا
93
00:06:15,919 –> 00:06:18,240
یک چرخ را متوقف کنید یا سرعت آن را کاهش دهید و بگذارید
94
00:06:18,240 –> 00:06:20,080
چرخ دیگر با همان
95
00:06:20,080 –> 00:06:23,600
سرعت حرکت کند یا چرخ ها را
96
00:06:23,600 –> 00:06:26,720
در جهات مختلف بچرخانید، بنابراین فرض کنید
97
00:06:26,720 –> 00:06:27,280
می خواهید بروید.
98
00:06:27,280 –> 00:06:30,479
چپ چرخ چپ خود را به عقب
99
00:06:30,479 –> 00:06:32,720
بچرخانید و چرخ راست خود را به جلو بچرخانید
100
00:06:32,720 –> 00:06:34,880
و به این ترتیب ربات شما می تواند به
101
00:06:34,880 –> 00:06:36,000
سمت چپ حرکت کند،
102
00:06:36,000 –> 00:06:39,120
بنابراین بیایید سعی کنیم در اینجا
103
00:06:39,120 –> 00:06:40,000
سرعت سمت چپ خود را
104
00:06:40,000 –> 00:06:42,319
به منفی تغییر دهیم و ادامه دهیم. سرعت راست ما
105
00:06:42,319 –> 00:06:44,639
مثبت باشد تا
106
00:06:44,639 –> 00:06:49,759
جلو برود ذخیره را بزنید
107
00:06:49,759 –> 00:06:52,639
و سپس بازی کنید
108
00:06:57,039 –> 00:06:59,039
همانطور که سرعت چپ را برگرداندم و
109
00:06:59,039 –> 00:07:01,199
سرعت نوشتم می بینیم که ربات در
110
00:07:01,199 –> 00:07:04,560
حال چرخش در جهت دیگر است
111
00:07:04,560 –> 00:07:07,440
حالا بیایید هر دو چرخ را با سرعت متفاوت داشته باشیم
112
00:07:07,440 –> 00:07:09,039
113
00:07:09,039 –> 00:07:17,840
و ببینیم چه این اتفاق می افتد
114
00:07:19,199 –> 00:07:21,120
همانطور که می بینید در حالت اول
115
00:07:21,120 –> 00:07:22,400
ربات در حال چرخش
116
00:07:22,400 –> 00:07:26,160
در جای خود بود، در این حالت در واقع
117
00:07:26,160 –> 00:07:29,599
با گرفتن یک دایره به دور یک نقطه حرکت می کند
118
00:07:29,599 –> 00:07:31,680
و این یک مزیت بزرگ داشتن یک
119
00:07:31,680 –> 00:07:32,800
120
00:07:32,800 –> 00:07:35,919
ربات محرک دیفرانسیل است که می تواند به خوبی در محل بچرخد همانطور
121
00:07:35,919 –> 00:07:37,440
که باید. با
122
00:07:37,440 –> 00:07:45,840
یک ربات اتاقبا دیده اید
123
00:07:46,400 –> 00:07:48,400
و وقتی سرعت را معکوس می کنیم، می
124
00:07:48,400 –> 00:07:50,560
بینید که ربات در حال رانندگی در
125
00:07:50,560 –> 00:07:53,120
جهت مخالف است،
126
00:07:53,120 –> 00:07:55,360
اینجا یک سوال جالب برای شما وجود دارد
127
00:07:55,360 –> 00:07:57,520
که چگونه می خواهید ربات را به
128
00:07:57,520 –> 00:08:01,919
عقب برانید، در نظرات زیر به من بگویید
129
00:08:01,919 –> 00:08:04,240
تا ما تازه یاد بگیریم که چگونه یک ربات را
130
00:08:04,240 –> 00:08:05,919
مستقیم برانید، اما این یک جور خسته کننده است، پس
131
00:08:05,919 –> 00:08:07,840
بیایید یک کار جالب انجام
132
00:08:07,840 –> 00:08:10,