در این مطلب، ویدئو تشخیص خطا در سیستم های کنترل – آموزش پیاده سازی پایتون با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:11:31
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
00:00:00,080 –> 00:00:02,480
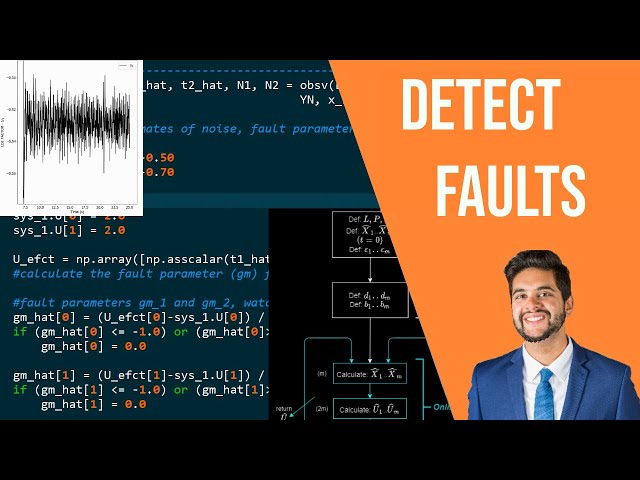
به یک ویدیوی جدید در مورد طراحی سیستم تشخیص و کنترل سقوط خوش آمدید،
2
00:00:02,480 –> 00:00:04,240
3
00:00:04,240 –> 00:00:06,080
بنابراین اگر به سیستمهای کنترل ما در
4
00:00:06,080 –> 00:00:07,600
تمام ویدیوهایی که تا کنون در کانال خود انجام دادهام نگاه کنید،
5
00:00:07,600 –> 00:00:09,760
آنها بر اساس سیستمهای کنترل خطی هستند
6
00:00:09,760 –> 00:00:11,759
که میتوانند به
7
00:00:11,759 –> 00:00:14,080
شکل فضای حالت نمایش داده شوند. مانند این نقطه x
8
00:00:14,080 –> 00:00:16,239
برابر با x به اضافه b bu است
9
00:00:16,239 –> 00:00:18,160
که در آن ماتریس سیستم شما
10
00:00:18,160 –> 00:00:19,920
a ماتریس ورودی b است
11
00:00:19,920 –> 00:00:23,119
، ورودی ها شما هستند و حالت ها x هستند،
12
00:00:23,119 –> 00:00:25,439
بنابراین اگر به تشخیص سقوط نگاه کنید،
13
00:00:25,439 –> 00:00:27,199
ما به فایل های ورودی
14
00:00:27,199 –> 00:00:29,279
در اینجا نگاه خواهیم کرد بنابراین محرک نادرست است زیرا
15
00:00:29,279 –> 00:00:31,760
ورودی های هر دستگاه مهندسی یک
16
00:00:31,760 –> 00:00:32,960
محرک هستند،
17
00:00:32,960 –> 00:00:35,440
به عنوان مثال یک هواپیما، یک ماشین،
18
00:00:35,440 –> 00:00:37,520
بنابراین چیزی به نام ورودی موثر داریم که
19
00:00:37,520 –> 00:00:38,559
20
00:00:38,559 –> 00:00:40,399
21
00:00:40,399 –> 00:00:42,480
اگر کمتر از ورودی واقعی
22
00:00:42,480 –> 00:00:45,039
باشد، می تواند کمتر یا مساوی با ورودی واقعی باشد.
23
00:00:45,039 –> 00:00:48,079
بنابراین میتوانیم این ورودی b را بازسازی کنیم
24
00:00:48,079 –> 00:00:48,960
25
00:00:48,960 –> 00:00:50,480
و آن را bf بنامیم
26
00:00:50,480 –> 00:00:53,840
که در آن bf برابر با b ضرب در
27
00:00:53,840 –> 00:00:57,120
ماتریس هویت به اضافه پارامتر خطا است
28
00:00:57,120 –> 00:00:58,960
که برای هر ورودی از
29
00:00:58,960 –> 00:01:00,480
منفی یک تا صفر متغیر است،
30
00:01:00,480 –> 00:01:02,800
بنابراین اگر چهار ورودی داشته باشید، u
31
00:01:02,800 –> 00:01:04,080
چهار در یک میشود.
32
00:01:04,080 –> 00:01:06,080
و سپس f نیز چهار در یک خواهد بود، بنابراین
33
00:01:06,080 –> 00:01:07,520
34
00:01:07,520 –> 00:01:09,600
بدیهی است که هر ورودی دارای یک سقوط خواهد بود،
35
00:01:09,600 –> 00:01:11,040
36
00:01:11,040 –> 00:01:13,360
بنابراین اگر این را کنار هم قرار دهید به این معنی است
37
00:01:13,360 –> 00:01:14,240
که
38
00:01:14,240 –> 00:01:16,640
وقتی هر یک از این مقادیر f
39
00:01:16,640 –> 00:01:18,720
منفی یک است، به این معنی است که شما
40
00:01:18,720 –> 00:01:21,520
صد در صد خطا دارید، بنابراین loe ایستاده است. برای
41
00:01:21,520 –> 00:01:23,680
از دست دادن اثربخشی
42
00:01:23,680 –> 00:01:25,520
اگر حداکثر باشد به این معنی است که
43
00:01:25,520 –> 00:01:27,200
محرک موثر است بنابراین به این معنی است که
44
00:01:27,200 –> 00:01:28,799
شما در آنجا کارایی کامل را از دست
45
00:01:28,799 –> 00:01:29,759
می دهید
46
00:01:29,759 –> 00:01:32,000
اگر بین منفی یک و
47
00:01:32,000 –> 00:01:35,200
صفر باشد کارایی جزئی از دست داده اید
48
00:01:35,200 –> 00:01:36,799
و اگر صفر باشد به این معنی است که شما
49
00:01:36,799 –> 00:01:38,880
هیچ از دست دادن کارایی ندارند به عبارت دیگر
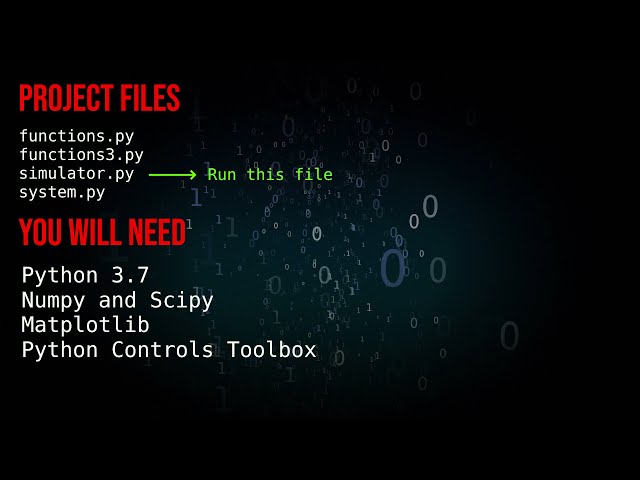
50
00:01:38,880 –> 00:01:41,040
محرک بدون خطا است
51
00:01:41,040 –> 00:01:44,399
و im ماتریس هویت m به m است
52
00:01:44,399 –> 00:01:45,840
اگر به فضای حالت در
53
00:01:45,840 –> 00:01:47,759
ویدیوهایی که قبل از انجام دادهام نگاه کنید m تعداد
54
00:01:47,759 –> 00:01:49,040
ورودیها
55
00:01:49,040 –> 00:01:52,159
n تعداد حالتها است و سپس
56
00:01:52,159 –> 00:01:54,479
p تعداد خروجیها است، بنابراین
57
00:01:54,479 –> 00:01:56,960
در حال حاضر ما به m برای m ورودی نیاز داریم،
58
00:01:56,960 –> 00:01:59,840
59
00:02:02,320 –> 00:02:04,240
بنابراین قبل از رفتن به
60
00:02:04,240 –> 00:02:06,079
مثال، میخواهم برخی از اطلاعات پیشزمینه را توضیح دهم،
61
00:02:06,079 –> 00:02:07,360
62
00:02:07,360 –> 00:02:09,520
بنابراین این آموزش در واقع برای
63
00:02:09,520 –> 00:02:11,520
پایاننامه کارشناسی ارشد من انجام میشود، جایی که من برخی از
64
00:02:11,520 –> 00:02:13,040
تحقیقات را تحت نظر اساتید انجام دادم. sor zhang در
65
00:02:13,040 –> 00:02:15,520
دانشگاه کنکوردیا در تشخیص و تشخیص سقوط،
66
00:02:15,520 –> 00:02:16,959
67
00:02:16,959 –> 00:02:18,800
بنابراین برای انجام این کار باید ابتدا نوع
68
00:02:18,800 –> 00:02:20,640
سیستم نامطمئن را درک کنید،
69
00:02:20,640 –> 00:02:22,319
بنابراین اگر چیزی دارید که
70
00:02:22,319 –> 00:02:23,680
در زندگی واقعی کار می کند
71
00:02:23,680 –> 00:02:25,520
، بدیهی است که خطا نامشخص است درست
72
00:02:25,520 –> 00:02:27,599
همانطور که می خواهید بدانید چه زمانی رخ می دهد. و
73
00:02:27,599 –> 00:02:29,360
چقدر بزرگ خواهد بود،
74
00:02:29,360 –> 00:02:31,360
بنابراین شما می توانید آن را در حوزه ای از
75
00:02:31,360 –> 00:02:33,200
مهندسی به نام
76
00:02:33,200 –> 00:02:35,680
سیستم های کنترل نامشخص طبقه بندی کنید که در آن عدم قطعیت محدود است،
77
00:02:35,680 –> 00:02:37,840
بنابراین مطمئن باشید که این
78
00:02:37,840 –> 00:02:40,400
خطا یا خطای کامل خواهد بود یا بدون خطا، بنابراین
79
00:02:40,400 –> 00:02:42,239
واضح است که هر گونه خطا در یک سیستم وجود دارد.
80
00:02:42,239 –> 00:02:44,080
با برخی از مقادیر محدود می شود
81
00:02:44,080 –> 00:02:45,440
الگوریتمی که ما استفاده
82
00:02:45,440 –> 00:02:48,319
خواهیم کرد ناظر valcott و zack است. این یک
83
00:02:48,319 –> 00:02:50,239
84
00:02:50,239 –> 00:02:52,080
ابزار تخمین وضعیت و خطا است که می توانید از پارامترها استفاده کنید
85
00:02:52,080 –> 00:02:53,760
و می توانید از قبل تعریف
86
00:02:53,760 –> 00:02:56,319
کنید تا عملیات را ذخیره کنید تا بتوانید
87
00:02:56,319 –> 00:02:59,280
یک را ذخیره کنید. از نظر محاسباتی زمان زیادی
88
00:02:59,280 –> 00:03:00,879
دارید و می توانید این را در سیستم هایی پیاده سازی
89
00:03:00,879 –> 00:03:02,560
کنید که در آنها قدرت پردازش زیادی ندارید،
90
00:03:02,560 –> 00:03:05,840
برای مثال
91
00:03:06,480 –> 00:03:08,000
اگر به تئوری زندگی به اندازه کافی نگاه کنید
92
00:03:08,000 –> 00:03:10,239
تا آن را خلاصه کنید، بنابراین من معرفی نکرده ام.
93
00:03:10,239 –> 00:03:12,000
این قبلاً اما من فقط همین الان
94
00:03:12,000 –> 00:03:14,480
برای اولین بار در کانالم
95
00:03:14,480 –> 00:03:15,840
آن را بررسی میکنم، بنابراین زمانی است که شما
96
00:03:15,840 –> 00:03:17,680
یک ماتریس پایدار دارید که
97
00:03:17,680 –> 00:03:19,360
تمام حالتها در واقع محدود شدهاند، بنابراین
98
00:03:19,360 –> 00:03:21,200
به مقداری همگرا میشوند،
99
00:03:21,200 –> 00:03:23,200
بنابراین به آن لیپو به اندازه کافی پایدار میگویند
100
00:03:23,200 –> 00:03:25,360
و به همگرا میشود. نقطه تعادل آن
101
00:03:25,360 –> 00:03:27,040
به عنوان مثال اگر چیزی را در داخل
102
00:03:27,040 –> 00:03:29,360
یک قیف بیندازید، به سمت
103
00:03:29,360 –> 00:03:31,120
مرکز قیف می رود، بنابراین تعادل آن
104
00:03:31,120 –> 00:03:33,599
105
00:03:33,599 –> 00:03:35,200
همین است، بنابراین ما در اینجا برخی از اصول را برای
106
00:03:35,200 –> 00:03:37,440
ناظر والکات و زک داریم
107
00:03:37,440 –> 00:03:40,080
که ماتریس l را با منهای
108
00:03:40,080 –> 00:03:41,920
الکل نیز تعریف کنید. دوباره فیلتر کالمن حالت پایدار باشد
109
00:03:41,920 –> 00:03:43,680
110
00:03:43,680 –> 00:03:46,720
و با استفاده از معادلات سه و چهار
111
00:03:46,720 –> 00:03:48,720
q باید مثبت نیمه معین یا قطعی مثبت
112
00:03:48,720 –> 00:03:52,480
باشد و dc برابر با pb است که ماتریس های انتقالی
113
00:03:52,480 –> 00:03:53,680
114
00:03:53,680 –> 00:03:56,959
c و b از یک سیستم هستند و p و
115
00:03:56,959 –> 00:03:59,200
d از ناظر شما هستند، بنابراین دریافت می کنید. اینها
116
00:03:59,200 –> 00:04:01,200
و شما آن را به
117
00:04:01,200 –> 00:04:03,360
عنوان مثال در آنجا تعریف می کنید اگر ببینید u f برابر با
118
00:04:03,360 –> 00:04:04,799
119
00:04:04,799 –> 00:04:08,480
85 است، 15 از دست دادن اثربخشی
120
00:04:08,480 –> 00:04:10,480
دارید، بنابراین حالت ها و خطاهای خود را x تخمین می زنید
121
00:04:10,480 –> 00:04:12,560
و u
122
00:04:12,560 –> 00:04:14,319
بنابراین u خطا را به شما می دهد، بنابراین
123
00:04:14,319 –> 00:04:16,959
ورودی موثر u hat u f است. کلاهی
124
00:04:16,959 –> 00:04:20,000
که از l d epsilon b
125
00:04:20,000 –> 00:04:21,358
برای به
126
00:04:21,358 –> 00:04:23,520
دست آوردن این تخمین ها استفاده
127
00:04:23,520 –> 00:04:26,080
می کنید، چندین مجموعه از آنها دارید که
128
00:04:26,080 –> 00:04:28,240
مربوط به تعداد ورودی ها
129
00:04:28,240 –> 00:04:30,800
از یک تا m و j نیز از یک به
130
00:04:30,800 –> 00:04:32,960
m است، بنابراین اگر فرض کنید پنج
131
00:04:32,960 –> 00:04:34,560
ورودی دارید، پنج مجموعه خواهید داشت. از این موارد
132
00:04:34,560 –> 00:04:36,800
و می توانید از هر یک از آنها
133
00:04:36,800 –> 00:04:38,639
برای بازخورد خود استفاده کنید زیرا حالت ها
134
00:04:38,639 –> 00:04:41,280
مشخصاً برای بازخورد هستند
135
00:04:41,280 –> 00:04:42,960
بنابراین مثال ما در اینجا قابل مشاهده است ما
136
00:04:42,960 –> 00:04:45,199
یک سیستم بسیار ساده داریم شما
137
00:04:45,199 –> 00:04:47,440
ماتریس a دارید بنابراین
138
00:04:47,440 –> 00:04:50,320
سه حالت و دو ورودی
139
00:04:50,320 –> 00:04:54,880
دارید بنابراین شما تعریف می کنید l و q و p و d
140
00:04:54,880 –> 00:04:56,320
بنابراین مقاله آن را به این صورت تعریف کرده است و
141
00:04:56,320 –> 00:04:58,240
ما این مثال را در پایتون پیادهسازی میکنیم،
142
00:04:58,240 –> 00:05:01,040
بنابراین بیایید
143
00:05:03,980 –> 00:05:08,840
[Music]
144
00:05:08,840 –> 00:05:10,960
شروع کنیم، بنابراین اینجا پیادهسازی پایتون است
145
00:05:10,960 –> 00:05:12,400
که میتوانید این را
146
00:05:12,400 –> 00:05:14,639
از لینک زیر دانلود کنید و یک کلاس
147
00:05:14,639 –> 00:05:17,520
برای خود تعریف کنید. سیستم a b c حالات
148
00:05:17,520 –> 00:05:20,160
شما x ورودی های شما y و غیره را مدل می کند و g m
149
00:05:20,160 –> 00:05:22,960
بردار خطا است بنابراین
150
00:05:22,960 –> 00:05:24,720
f یک تابع بعد برای
151
00:05:24,720 –> 00:05:27,680
محاسبه n m و p
152
00:05:27,680 –> 00:05:29,600
تعریف می کنید و به همین ترتیب مرحله زمانی شبیه سازی خود را تعریف می کنید تا
153
00:05:29,600 –> 00:05:31,919
س



![فیلم آموزشی: Pyside2 ایجاد گفتگوی پیش نمایش چاپ [توسعه رابط کاربری گرافیکی Python] با زیرنویس فارسی](http://pezhvak24.ir/dl/learn/wp-content/uploads/upyt/8z-hpXfmgFcimage2.jpg)