در این مطلب، ویدئو شمارش سکه از تصویر با استفاده از پایتون | آموزش | کامپیوتر ویژن با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:11:25
تصاویر این ویدئو:
قسمتی از زیرنویس این فیلم:
00:00:04,975 –> 00:00:07,895
سلام بچه ها! در این ویدیو، من به شما نشان می دهم که چگونه می توانید
2
00:00:07,895 –> 00:00:10,955
سکه ها را در یک تصویر با استفاده از پایتون و OpenCV بشمارید،
3
00:00:10,955 –> 00:00:11,955
پس بیایید شروع کنیم!
4
00:00:13,545 –> 00:00:15,785
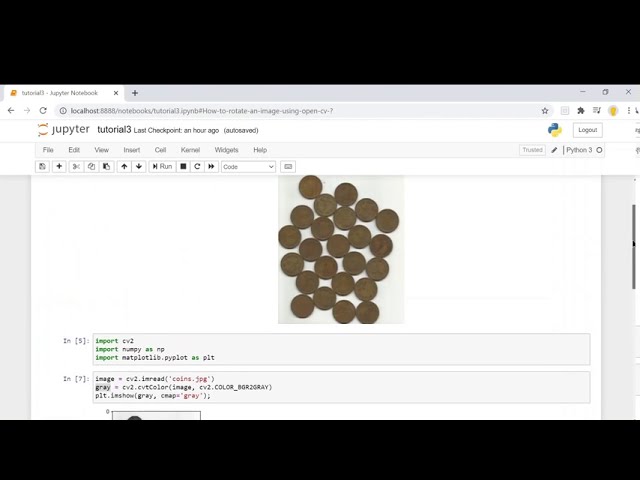
ابتدا سه کتابخانه را وارد می کنیم
5
00:00:16,125 –> 00:00:17,635
یکی OpenCV
6
00:00:18,545 –> 00:00:20,015
دوم
7
00:00:22,035 –> 00:00:25,475
Numpy است، خواهیم دید که آیا نیاز است یا نه
8
00:00:26,085 –> 00:00:28,425
سومی matplotlib است
9
00:00:38,055 –> 00:00:40,155
سپس تصویر را می خوانیم
10
00:00:45,185 –> 00:00:46,655
بنابراین در اینجا از
11
00:00:47,815 –> 00:00:50,585
دستور cv2.imread() برای
خواندن تصویر استفاده می کنیم
12
00:01:00,960 –> 00:01:04,640
و سپس چه ما این کار را انجام می دهیم این است که
این تصویر را به یک تصویر در مقیاس خاکستری تبدیل می کنیم
13
00:01:33,780 –> 00:01:36,880
برای نمایش خود از تابع matplotlib ()plt.imshow استفاده می کنیم.
14
00:01:36,885 –> 00:01:38,475
15
00:01:50,735 –> 00:01:53,885
حالا چون تصویر ما یک تصویر در
مقیاس خاکستری است، بنابراین
16
00:01:53,945 –> 00:01:56,985
از camp = ‘خاکستری’ استفاده خواهیم کرد
17
00:01:59,855 –> 00:02:02,155
حالا می توانید ببینید که ما
نمایش داده شده ایم تصویر ما
18
00:02:03,295 –> 00:02:04,295
برای
19
00:02:04,395 –> 00:02:07,555
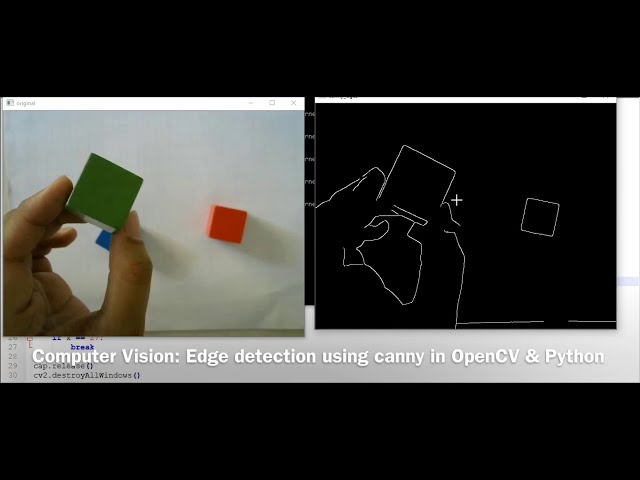
شمارش سکههای موجود در تصویر،
باید لبهها را تشخیص دهیم،
20
00:02:08,335 –> 00:02:11,425
اما قبل از تشخیص لبهها
، باید
21
00:02:11,425 –> 00:02:12,705
تصاویر را محو
22
00:02:13,525 –> 00:02:15,795
کنیم تا از تشخیص نویز جلوگیری
23
00:02:17,015 –> 00:02:19,305
کنیم، بنابراین از تابع GaussianBlur() استفاده میکنیم.
24
00:02:20,345 –> 00:02:21,345
..
25
00:02:38,645 –> 00:02:40,745
در اینجا پارامتر اول
26
00:02:40,745 –> 00:02:42,415
چیزی نیست جز تصویر ورودی ما
27
00:02:42,735 –> 00:02:44,605
و پارامتر secong
28
00:02:44,915 –> 00:02:48,065
اندازه پنجره هسته است
29
00:02:48,065 –> 00:02:50,000
که
30
00:02:51,015 –> 00:02:53,845
روی کل تصویر قرار می گیرد
و
31
00:02:54,805 –> 00:02:57,885
مقدار پیکسل مرکزی را با استفاده از
الگوریتم گاوس محاسبه می کند
32
00:02:58,065 –> 00:03:00,865
و صفر (آگومان سوم)
33
00:03:00,865 –> 00:03:04,155
انحراف استاندارد است. ، بنابراین
34
00:03:04,155 –> 00:03:07,145
اگر این مقدار را صفر نگه
داریم در اینجا خواهد بود
35
00:03:07,145 –> 00:03:08,675
انحراف معیار
را خود به خود محاسبه کنید،
36
00:03:09,205 –> 00:03:12,035
بنابراین نیازی نیست نگران محاسبه
37
00:03:12,035 –> 00:03:13,475
انحراف معیار
38
00:03:15,585 –> 00:03:18,685
باشیم اگر اندازه این هسته را افزایش دهیم
39
00:03:18,685 –> 00:03:21,725
، تصویر تارتر می شود،
40
00:03:24,005 –> 00:03:26,975
بنابراین بیایید ببینیم تصویر ما
پس از تار شدن چگونه نشان داده می شود.
41
00:03:26,975 –> 00:03:27,975
42
00:03:42,615 –> 00:03:45,705
ما تصویر خود را تار کرده ایم. اکنون ما
43
00:03:45,705 –> 00:03:48,745
از الگوریتم آشکارساز لبه Canny
44
00:03:48,745 –> 00:03:50,715
برای
تشخیص لبه ها استفاده خواهیم کرد
45
00:04:09,785 –> 00:04:12,795
بنابراین در اینجا اولین پارامتر
تصویر ورودی ما است
46
00:04:12,795 –> 00:04:15,555
که این یکی است. بنابراین ما
از این تصویر استفاده خواهیم کرد
47
00:04:16,985 –> 00:04:20,045
و نه از این
یا اولین تصویر،
48
00:04:20,045 –> 00:04:23,025
زیرا نمیخواهیم
نویز
49
00:04:23,025 –> 00:04:25,405
بگیریم، فقط میخواهیم لبهها را بگیریم
50
00:04:25,405 –> 00:04:27,555
،
51
00:04:29,455 –> 00:04:32,075
بنابراین این اولین پارامتر ما در مرحله
دوم و
52
00:04:32,075 –> 00:04:34,515
پارامتر سوم
53
00:04:35,055 –> 00:04:36,055
حداقل
54
00:04:36,375 –> 00:04:39,605
مقدار و
مقدار بالایی است. آستانه
55
00:04:40,655 –> 00:04:43,495
آشکارساز لبه Canny ما مقادیر لبه ها
را
56
00:04:43,695 –> 00:04:44,805
محاسبه می
57
00:04:45,235 –> 00:04:48,305
کند و اگر هر
یال دارای مقدار کمتر از 30
58
00:04:48,305 –> 00:04:51,335
باشد به عنوان یال در نظر گرفته نمی شود
و اگر
59
00:04:51,335 –> 00:04:54,025
هر یال دارای مقدار
بالاتر از 150
60
00:04:54,025 –> 00:04:55,695
باشد به عنوان
لبه مطمئن
61
00:04:56,235 –> 00:04:58,925
و هر مقداری محاسبه می شود.
62
00:04:58,925 –> 00:05:01,025
که بین 30 و 150
63
00:05:01,795 –> 00:05:04,045
قرار دارد بسته به اینکه به لبه ای که دارای ارزش > 150 است وصل شده باشد یال در نظر گرفته می شود (یا نه)
64
00:05:04,345 –> 00:05:07,425
65
00:05:07,425 –> 00:05:09,900
66
00:05:10,700 –> 00:05:12,920
خوب است؟ و
67
00:05:15,820 –> 00:05:17,320
.. چهارمین پارامتر
68
00:05:17,875 –> 00:05:20,335
اندازه هسته
69
00:05:21,725 –> 00:05:24,205
فیلتر Sobel Sobel است که محاسبه می شود
70
00:05:24,205 –> 00:05:25,595
(تشخیص) لبه
71
00:05:26,405 –> 00:05:28,065
3 مقدار پیش فرض است.
72
00:05:30,675 –> 00:05:34,175
73
00:05:48,335 –> 00:05:51,415
74
00:05:52,405 –> 00:05:54,165
75
00:05:54,755 –> 00:05:57,595
آیا لبه ها
به یکدیگر متصل نیستند،
76
00:05:57,76



![فیلم آموزشی: نحوه نصب کد VS و اجرای پایتون در اوبونتو 18.04 [2020] با زیرنویس فارسی](http://pezhvak24.ir/dl/learn/wp-content/uploads/upyt/h0HbFnb8bC8image2.jpg)