در این مطلب، ویدئو اسکن و چاپ پایتون با SPIKE Prime با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:14:53
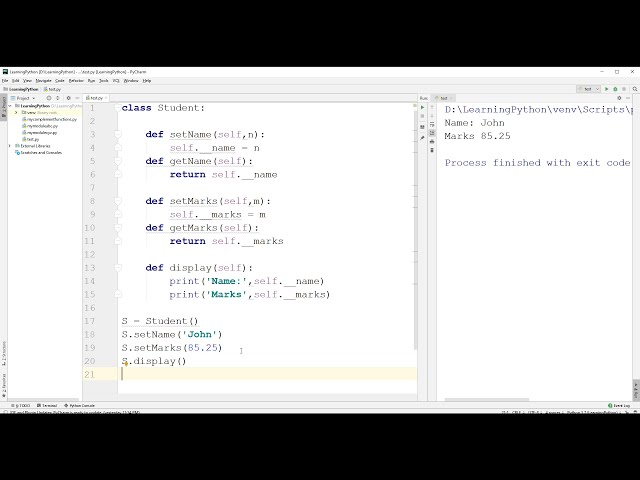
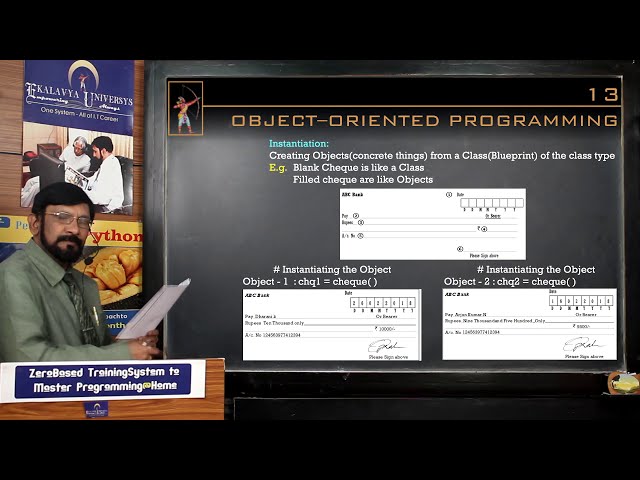
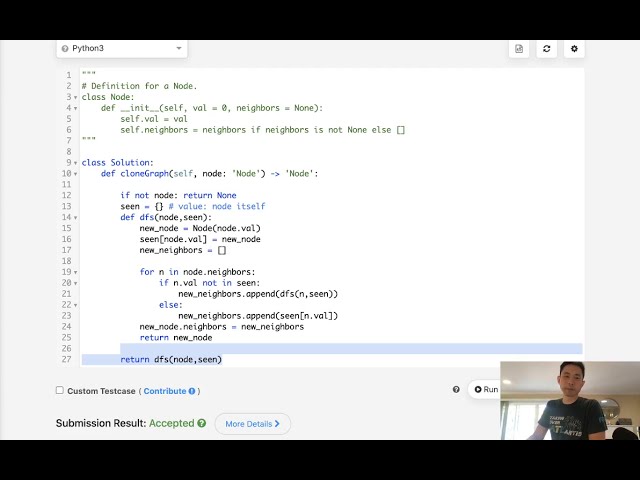
تصاویر این ویدئو:



قسمتی از زیرنویس این فیلم:
00:00:00,080 –> 00:00:01,599
امروز همه به
2
00:00:01,599 –> 00:00:04,080
قسمت دیگری از پایتون برای رباتیک لگو خوش آمدید،
3
00:00:04,080 –> 00:00:06,720
ما یاد میگیریم که چگونه یک ربات را
4
00:00:06,720 –> 00:00:12,120
برای اسکن و چاپ با استفاده از پایتون
5
00:00:21,560 –> 00:00:24,640
[Music
6
00:00:24,640 –> 00:00:26,560
] قبل از جلسه، کدنویسی کنیم تا برادران جلسه
7
00:00:26,560 –> 00:00:29,119
یک ربات اسکن و چاپ خارقالعاده
8
00:00:29,119 –> 00:00:31,519
برای ربات Minstorms ارائه کنند. مخترع
9
00:00:31,519 –> 00:00:34,000
من یک ربات اسکن کننده از خودم برای
10
00:00:34,000 –> 00:00:36,559
spike prime به نام scanner prime ایجاد کردم. اکنون
11
00:00:36,559 –> 00:00:38,960
scanner prime از مکانیزم قفسه و پینیون
12
00:00:38,960 –> 00:00:41,600
برای کنترل سنسور رنگ برای
13
00:00:41,600 –> 00:00:44,000
اسکن یک طرف ربات استفاده می کند و در حالی که در
14
00:00:44,000 –> 00:00:47,200
حال حرکت است از مکانیزم پیستونی
15
00:00:47,200 –> 00:00:49,840
در سمت دیگر استفاده می کند. از ربات برای چاپ
16
00:00:49,840 –> 00:00:52,239
در طرف مقابل چرا ما در پایتون کدنویسی می کنیم
17
00:00:52,239 –> 00:00:54,640
به این دلیل است که پایتون یکی
18
00:00:54,640 –> 00:00:56,719
از محبوب ترین زبان های برنامه نویسی در جهان است که
19
00:00:56,719 –> 00:00:59,199
می توانید از پایتون برای نوشتن
20
00:00:59,199 –> 00:01:01,600
تقریباً هر نوع برنامه ای استفاده کنید، چه
21
00:01:01,600 –> 00:01:04,239
برای وب سایت های رباتیک یا اتوماسیون خانگی
22
00:01:04,239 –> 00:01:06,880
یا بازی های ویدیویی. و از همه مهمتر
23
00:01:06,880 –> 00:01:09,520
یادگیری آن بسیار آسان است که آن را به
24
00:01:09,520 –> 00:01:12,159
یک پیشرفت طبیعی از ابتدا تبدیل می کند و
25
00:01:12,159 –> 00:01:14,479
برنامه نویسی مبتنی بر بلوک اکنون قبل از
26
00:01:14,479 –> 00:01:16,400
شروع، باید
27
00:01:16,400 –> 00:01:19,600
اسکنر پرایم را توسط watchi بسازید. در این ویدیو یا
28
00:01:19,600 –> 00:01:21,280
می توانید با
29
00:01:21,280 –> 00:01:23,280
دانلود دستورالعمل pdf در
30
00:01:23,280 –> 00:01:25,680
لینک زیر برای قیمت یک فنجان
31
00:01:25,680 –> 00:01:26,400
قهوه
32
00:01:26,400 –> 00:01:28,640
33
00:01:28,640 –> 00:01:31,680
از کانال من
34
00:01:31,680 –> 00:01:33,840
35
00:01:33,840 –> 00:01:35,280
حمایت کنید. در حین
36
00:01:35,280 –> 00:01:37,600
ساخت و ساز دور خود باشید و به یاد داشته باشید که این حمایت شماست
37
00:01:37,600 –> 00:01:39,360
که به من اجازه می دهد به ساختن ویدیوهای کدنویسی ادامه دهم،
38
00:01:39,360 –> 00:01:42,320
بنابراین پیشاپیش از شما متشکرم، بیایید
39
00:01:42,320 –> 00:01:43,920
وارد کد
40
00:01:43,920 –> 00:01:46,799
شویم، بنابراین اولین کاری که می کنیم این است که
41
00:01:46,799 –> 00:01:49,600
دکمه پروژه جدید را در انتخاب spike prime بزنیم.
42
00:01:49,600 –> 00:01:53,119
فایل پایتون را انتخاب کنید و این
43
00:01:53,119 –> 00:01:54,399
44
00:01:54,399 –> 00:01:55,759
اسکنر
45
00:01:55,759 –> 00:01:58,159
46
00:01:58,399 –> 00:02:00,640
47
00:02:00,640 –> 00:02:02,000
48
00:02:02,000 –> 00:02:05,200
49
00:02:05,200 –> 00:02:08,479
50
00:02:08,479 –> 00:02:10,318
پایتون را صدا بزنید
51
00:02:10,318 –> 00:02:11,760
. این را کمی
52
00:02:11,760 –> 00:02:15,120
بزرگتر میکنم تا همه
53
00:02:17,680 –> 00:02:19,440
پرچم آماده را برابر با false ببینند و سپس
54
00:02:19,440 –> 00:02:21,040
55
00:02:21,040 –> 00:02:26,000
موتور چاپ برابر با موتور در موتور
56
00:02:26,000 –> 00:02:27,840
دروازهای b uh
57
00:02:27,840 –> 00:02:28,879
58
00:02:28,879 –> 00:02:31,680
برابر با موتور
59
00:02:31,680 –> 00:02:34,160
c باشد، بنابراین دروازهای بخشی است که به
60
00:02:34,160 –> 00:02:36,400
چپ و راست حرکت میکند و موتور چاپ
61
00:02:36,400 –> 00:02:38,080
کنترلی حرکت بالا و پایین
62
00:02:38,080 –> 00:02:40,319
قلم
63
00:02:40,800 –> 00:02:43,280
ببخشید
64
00:02:47,519 –> 00:02:49,280
65
00:02:49,280 –> 00:02:53,840
موتور چرخ برابر است با موتور در
66
00:02:54,959 –> 00:02:57,360
f دکمه برابر با
67
00:02:57,360 –> 00:02:59,760
68
00:03:00,560 –> 00:03:02,080
سنسور نیرو
69
00:03:02,080 –> 00:03:04,640
در a
70
00:03:04,640 –> 00:03:07,360
و سنسور رنگ
71
00:03:07,360 –> 00:03:10,879
برابر با پورت حسگر رنگ است
72
00:03:11,040 –> 00:03:12,080
73
00:03:12,080 –> 00:03:13,760
و
74
00:03:13,760 –> 00:03:16,000
ما همچنین یک اسکن تنظیم می کنیم flag
75
00:03:16,000 –> 00:03:16,840
بنابراین
76
00:03:16,840 –> 00:03:21,200
اسکن با false شروع می شود
77
00:03:21,200 –> 00:03:24,239
و دکمه فشار داده می
78
00:03:24,720 –> 00:03:27,280
شود همچنین برابر با false است که چرا من از
79
00:03:27,280 –> 00:03:29,599
پرچم فشار دکمه استفاده می کنم و نه فقط
80
00:03:29,599 –> 00:03:31,120
با استفاده مستقیم از
81
00:03:31,120 –> 00:03:33,840
چهار سنسور عملکرد فشار داده شده است،
82
00:03:33,840 –> 00:03:36,159
زیرا اگر من از عملکرد is press
83
00:03:36,159 –> 00:03:38,319
استفاده کنم می تواند چندین بار فعال شود.
84
00:03:38,319 –> 00:03:40,560
می خواهید از یک پرچم برای ایجاد آن استفاده کنید تا
85
00:03:40,560 –> 00:03:42,720
اگر سنسور نیرو را فشار دهم فقط
86
00:03:42,720 –> 00:03:45,280
یک بار فعال شود و
87
00:03:45,280 –> 00:03:48,080
منظور من را بعداً متوجه خواهید شد که
88
00:03:48,080 –> 00:03:50,480
ما یک تابع بازنشانی تعریف می کنیم،
89
00:03:50,480 –> 00:03:53,040
بنابراین در اینجا به تعریف
90
00:03:53,040 –> 00:03:54,560
بازنشانی
91
00:03:54,560 –> 00:03:56,239
می رویم. وقتی ریست
92
00:03:56,239 –> 00:04:00,920
میکنیم، حالت آماده را روی چاپ غلط تنظیم میکنیم،
93
00:04:01,120 –> 00:04:03,120
94
00:04:03,120 –> 00:04:04,400
اوه، نقطهی
95
00:04:04,400 –> 00:04:07,599
اجرا را روی موقعیت
96
00:04:09,280 –> 00:04:11,519
صفر چرخهای
97
00:04:11,519 –> 00:04:13,120
موتور
98
00:04:13,120 –> 00:04:16,560
نقطهای برای
99
00:04:17,358 –> 00:04:21,599
شش ثانیه با سرعت
100
00:04:22,840 –> 00:04:24,800
-10- هاب قرار میدهیم.
101
00:04:24,800 –> 00:04:26,880
102
00:04:26,880 –> 00:04:29,199
نقطه ماتریس نور درست
103
00:04:29,199 –> 00:04:31,440
آماده است،
104
00:04:31,440 –> 00:04:34,160
بنابراین کاری که انجام میدهیم این است. ما در حال
105
00:04:34,160 –> 00:04:36,479
حرکت موتور چاپ به سمت آن هستیم موقعیت خنثی را
106
00:04:36,479 –> 00:04:40,240
طوری قرار دهید که پین خیلی از کاغذ فاصله داشته باشد و س
107
00:04:40,240 –> 00:04:41,919
س موتور در
108
00:04:41,919 –> 00:04:45,120
ازه ای دروازه را تا یک طر
109
00:04:45,120 –> 00:04:48,000
110
00:04:48,400 –> 00:04:49,919
ماتریس نور بالا حرکت دهد و بگوید آم
111
00:04:49,919 –> 00:04:51,840
ده است و سپس حالت آماده را تنظیم می کن
112
00:04:51,840 –> 00:04:54,479
. پرچم را روی true
113
00:04:54,479 –> 00:04:56,160
و سپس پرچم اسکن
114
00:04:56,160 –> 00:04:58,080
115
00:04:58,080 –> 00:04:59,680
را روی false تنظیم می
116
00:04:59,680 –> 00:05:03,199
کند، خوب است، سپس باید یک
117
00:05:03,199 –> 00:05:05,199
تابع start stop ایجاد کنیم تا تابع start stop
118
00:05:05,199 –> 00:05:07,199
به گونه ای طراحی شود که
119
00:05:07,199 –> 00:05:09,199
ما همان تابع را برای راه اندازی
120
00:05:09,199 –> 00:05:12,000
ربات و همچنین متوقف کردن آن اجرا کنیم. ربات
121
00:05:12,000 –> 00:05:15,600
بنابراین برای تعریف یک ایستگاه شروع،
122
00:05:16,320 –> 00:05:18,080
ما می رویم
123
00:05:18,080 –> 00:05:20,240
و اسکن جهانی را تنظیم
124
00:05:20,240 –> 00:05:22,000
می کنیم، به این معنی که
125
00:05:22,000 –> 00:05:24,880
از متغیر اسکن سراسری استفاده می کنیم و
126
00:05:24,880 –> 00:05:27,039
به طور تصادفی یک
127
00:05:27,039 –> 00:05:30,080
متغیر
128
00:05:30,080 –> 00:05:32,000
129
00:05:32,000 –> 00:05:33,840
130
00:05:33,840 –> 00:05:39,080
اسکن در داخل اینجا ایجاد
131
00:05:39,360 –> 00:05:40,880
نمی کنیم.
132
00:05:40,880 –> 00:05:44,000
اسکن برابر با false است، بنابراین اگر ما در حال
133
00:05:44,000 –> 00:05:45,680
حاضر اسکن نمیکنیم، میخواهیم
134
00:05:45,680 –> 00:05:48,400
روند اسکن را شروع کنیم، بنابراین اسکن
135
00:05:48,400 –> 00:05:51,080
برابر است با
136
00:05:51,080 –> 00:05:52,960
hub.speaker
137
00:05:52,960 –> 00:05:55,360
dot beep واقعی
138
00:05:55,360 –> 00:05:56,479
60
139
00:05:56,479 –> 00:05:59,199
0.2
140
00:05:59,440 –> 00:06:01,759
و hub.light
141
00:06:01,759 –> 00:06:04,639
ماتریس نقطه اسکن سمت راست
142
00:06:04,639 –> 00:06:05,680
،
143
00:06:05,680 –> 00:06:08,160
بنابراین درست قبل از شروع اسکن،
144
00:06:08,160 –> 00:06:10,319
گوی است. ng برای ایجاد چند بوق پرچمها را تنظیم کنید
145
00:06:10,319 –> 00:06:12,319
و سپس بنویسید که ما شروع به
146
00:06:12,319 –> 00:06:13,919
اسکن
147
00:06:13,919 –> 00:06:15,600
148
00:06:15,600 –> 00:06:19,360
میکنیم اگر اسکن نمیشود خوب است، پس
149
00:06:19,360 –> 00:06:21,759
میخواهیم اگر قبلاً در حال اسکن است،
150
00:06:21,759 –> 00:06:24,240
میخواهیم اسکن را متوقف کنیم، بنابراین در اینجا
151
00:06:24,240 –> 00:06:25,919
میگوییم اسکن
152
00:06:25,919 –> 00:06:28,400
برابر است با نادرست.
153
00:06:28,400 –> 00:06:30,319
بلندگوی بالا
154
00:06:30,319 –> 00:06:32,400
نقطه بوق
155
00:06:32,400 –> 00:06:33,680
68
156
00:06:33,680 –> 00:06:36,400
0.2
157
00:06:36,400 –> 00:06:38,240
و سپس ربات را ریست می کنیم
158
00:06:38,240 –> 00:06:38,960
،
159
00:06:38,960 –> 00:06:42,880
بنابراین اگر اسکن می کنیم، اسکن را متوقف می کنیم
160
00:06:42,880 –> 00:06:44,639
، اما اگر اسکن
161
00:06:44,639 –> 00:06:46,319
نمی کنیم، اسکن را شروع می کنیم و اینگونه است
162
00:06:46,319 –> 00:06:49,520
که با این عملکرد شروع توقف حرکت
163
00:06:49,520 –> 00:06:50,479
164
00:06:50,479 –> 00:06:53,120
می کنیم، ما را از انجام آن نجات می
165
00:06:53,120 –> 00:06:54,479
دهد. آن را
166
00:06:54,479 –> 00:06:56,720
با دو عملکرد مختلف و همچنین
167
00:06:56,720 –> 00:06:59,199
روشی را که ما از سنسور نیرو استفاده می کنیم تقلید می کند
168
00:06:59,199 –> 00:07:00,960
زیرا می خواهیم از
169
00:07:00,960 –> 00:07:03,440
همان سنسور نیرو برای شروع شروع
170
00:07:03,440 –> 00:07:05,280
و توقف
171
00:07:05,280 –> 00:07:07,520
بعدی استفاده کنیم.
172
00:07:07,520 –> 00:07:11,120
173
00:07:11,199 –> 00:07:14,319
چیزی پشتیبانگیری کنید،
174
00:07:15,280 –> 00:07:18,000
ما میخواهیم نور uh را تنظیم کنیم،
175
00:07:18,000 –> 00:07:19,199
176
00:07:19,199 –> 00:07:21,520
میدانید از چه چیزی فقط از نماد شاد استفاده میکنیم، این یک
177
00:07:21,520 –> 00:07:24,800
178
00:07:24,800 –> 00:07:27,360
179
00:07:27,360 –> 00:07:31,599
موتور چاپ خوب است که سرعت پیشفرض را تنظیم