در این مطلب، ویدئو فیلتر کالمن توسعه یافته با کد پایتون توضیح داده شده است با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:06:01
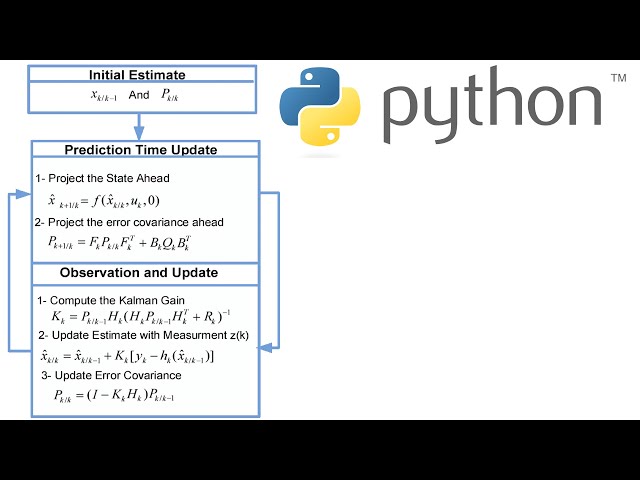
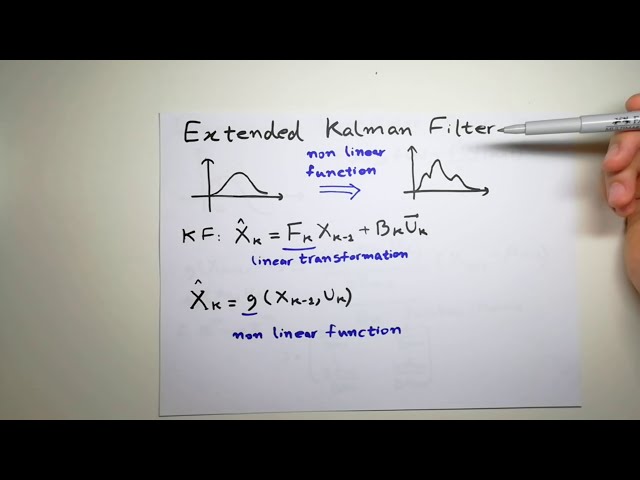
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
00:00:00,030 –> 00:00:02,129
در این ویدیو در مورد
2
00:00:02,129 –> 00:00:04,650
میزان فیلتر رایج صحبت خواهم کرد که من
3
00:00:04,650 –> 00:00:08,300
کد را در پایتون پیاده سازی کرده ام، بنابراین
4
00:00:08,300 –> 00:00:11,429
اکیداً به شما توصیه می کنم که نگاهی به
5
00:00:11,429 –> 00:00:13,920
ویدیوی دیگر من در مورد فیلتر مشترک بیندازید که در آن
6
00:00:13,920 –> 00:00:16,379
تمام معادلات را توضیح می دهم و چگونه
7
00:00:16,379 –> 00:00:20,539
آنها را به دست آوریم و کد برای
8
00:00:20,539 –> 00:00:22,289
کامای تاکیدی فکر میکرد که من پیادهسازی کردهام،
9
00:00:22,289 –> 00:00:26,099
بنابراین یک بررسی است اگر
10
00:00:26,099 –> 00:00:27,900
به یاد داشته باشید که فیلتر مشترک ما چیست این بود که
11
00:00:27,900 –> 00:00:30,689
هر حالت مربوط به
12
00:00:30,689 –> 00:00:35,280
ماتریس Y حالت قبلی بود و آن این بود
13
00:00:35,280 –> 00:00:36,899
که یک ماتریس مجموعهای از
14
00:00:36,899 –> 00:00:38,760
اعداد است. یک
15
00:00:38,760 –> 00:00:40,950
تبدیل خطی بنابراین ما یک
16
00:00:40,950 –> 00:00:44,430
فرض خطی در حالت داریم و همچنین
17
00:00:44,430 –> 00:00:48,239
فرض میکنیم که هر حالتی که داریم
18
00:00:48,239 –> 00:00:50,460
شکلی از گاوسی است که به این معنی است که ما
19
00:00:50,460 –> 00:00:52,260
در جایی در اطراف هستیم با مقداری
20
00:00:52,260 –> 00:00:54,239
عدم قطعیت که نشان میدهیم
21
00:00:54,239 –> 00:00:58,640
کوواریانس را نیز مدلسازی میکنیم.
22
00:00:58,640 –> 00:01:01,859
اندازهگیریها با گاهی اوقات
23
00:01:01,859 –> 00:01:04,709
توزیع دوباره، بنابراین برای اضافه کردن مقداری کمبر
24
00:01:04,709 –> 00:01:08,520
خطی و در گاوسی در بیشتر
25
00:01:08,520 –> 00:01:10,770
موارد، دو حالت با تبدیل خطی به هم مرتبط نیستند،
26
00:01:10,770 –> 00:01:14,189
معمولاً
27
00:01:14,189 –> 00:01:18,180
سینوس و کسینوس زیادی داریم که آن را تبدیل به یک میکند.
28
00:01:18,180 –> 00:01:21,960
تابع خطی جدید برای
29
00:01:21,960 –> 00:01:27,360
اندازهگیریها هم همینطور است، بنابراین فیلتر گاما
30
00:01:27,360 –> 00:01:30,810
اگر به یاد داشته باشید وقتی
31
00:01:30,810 –> 00:01:33,030
مقداری توزیع را در یک عدد یا با یک
32
00:01:33,030 –> 00:01:35,479
ماتریس ضرب میکنید، یک گاوسی دیگر دریافت خواهید کرد
33
00:01:35,479 –> 00:01:37,979
که به این معنی است که K برابر بیشتر بود و
34
00:01:37,979 –> 00:01:41,880
کوواریانس K توان 2 بود یا اگر آن را داشت. یک
35
00:01:41,880 –> 00:01:44,700
ماتریس بود، اگر به یاد داشته باشید
36
00:01:44,700 –> 00:01:50,009
به شکل آلفا بود اگر تمام سیگما F
37
00:01:50,009 –> 00:01:52,590
جابجا شود، اما اگر آن را
38
00:01:52,590 –> 00:01:54,990
از یک تابع غیرخطی عبور دهید، اگر آن را از یک تابع غیرخطی عبور دهید،
39
00:01:54,990 –> 00:01:58,250
40
00:01:58,250 –> 00:02:02,000
توزیع جدیدی دریافت می کنیم که گاوسی نیست،
41
00:02:02,000 –> 00:02:07,170
بنابراین همه شرایط زیر پا گذاشته شده اند، بنابراین
42
00:02:07,170 –> 00:02:09,628
ما دیگر
43
00:02:09,628 –> 00:02:12,000
دوست داریم از فرض خطی بودن
44
00:02:12,000 –> 00:02:15,269
و میانگین گوسی برای استفاده از
45
00:02:15,269 –> 00:02:17,000
فیلتر مشترک استفاده کنیم.
46
00:02:17,000 –> 00:02:20,519
یک روش ساده این است که آن را
47
00:02:20,519 –> 00:02:24,780
در اطراف نقاطی که در حال حاضر در آن هستیم خطی کنیم و
48
00:02:24,780 –> 00:02:32,760
سپس دوباره از یک فیلتر مشترک استفاده کنیم تا استفاده کنیم.
49
00:02:32,760 –> 00:02:36,060
دستور اول تیلور استگر برای
50
00:02:36,060 –> 00:02:39,030
خطیسازی،
51
00:02:39,030 –> 00:02:41,489
تابع را در آنجا تقریب میکنیم، بنابراین فرض کنید یک
52
00:02:41,489 –> 00:02:45,150
شکل سینوسی مانند این داریم و
53
00:02:45,150 –> 00:02:49,139
آن را در اطراف نقطه a خطی میکنیم و
54
00:02:49,139 –> 00:02:53,879
میتوانید 4 4 4 4 را ببینید. نقاط e در