در این مطلب، ویدئو یک سنسور حرکتی FLL را در پایتون با Spike Prime برنامه ریزی کنید با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
مدت زمان فیلم: 00:08:33
تصاویر این ویدئو:


قسمتی از زیرنویس این فیلم:
00:00:08,039 –> 00:00:10,750
سلام، نام من جیک است، من قصد دارم
2
00:00:10,750 –> 00:00:13,870
سنسور حرکت سنبله به
3
00:00:13,870 –> 00:00:17,050
ویژه ژیروسکوپ روی
4
00:00:17,050 –> 00:00:21,580
آن را بررسی کنم، بنابراین ژیروسکوپ به شما اجازه می
5
00:00:21,580 –> 00:00:24,369
دهد تا چرخش را روی ربات در
6
00:00:24,369 –> 00:00:28,410
سه تاکسی مختلف اندازه گیری کنید و
7
00:00:28,410 –> 00:00:31,089
زمانی که می خواهید روی ربات بچرخید. آجر
8
00:00:31,089 –> 00:00:34,450
را به این صورت قرار دهید چرخش در
9
00:00:34,450 –> 00:00:38,920
این محور چرخش است چرخش در این محور
10
00:00:38,920 –> 00:00:44,680
در رول چرخش در این محور است اکنون برای
11
00:00:44,680 –> 00:00:47,320
اولین لیگ لگو با فرض اینکه آجر خود را به
12
00:00:47,320 –> 00:00:49,300
این شکل نصب کرده اید، تقریباً
13
00:00:49,300 –> 00:00:50,530
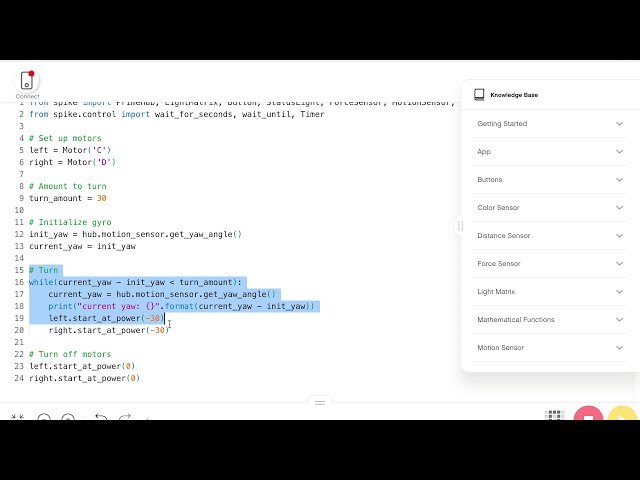
به راحتی
14
00:00:50,530 –> 00:00:52,480
می توانید به احتمال زیاد همیشه
15
00:00:52,480 –> 00:00:54,670
نیاز به استفاده از جوان وجود دارد، زیرا چرخش به این صورت خواهد
16
00:00:54,670 –> 00:00:57,100
بود و این مسیر اصلی
17
00:00:57,100 –> 00:01:00,340
است که شما ربات خود را هدایت می کنید، بنابراین
18
00:01:00,340 –> 00:01:03,640
من برنامه ای در اینجا دارم که دارم
19
00:01:03,640 –> 00:01:05,140
حتی تعدادی درجه را قرار
20
00:01:05,140 –> 00:01:07,270
می دهم که دقیقاً به همین مقدار پرتاب می شود.
21
00:01:07,270 –> 00:01:09,040
در اینجا
22
00:01:09,040 –> 00:01:17,140
برای 30 درجه به نظر می رسد و سپس اینجا
23
00:01:17,140 –> 00:01:24,790
برای 90 درجه به نظر می رسد و اکنون
24
00:01:24,790 –> 00:01:28,780
کد را به شما نشان می دهم و اکنون می
25
00:01:28,780 –> 00:01:30,310
خواهم کد نسخه ی نمایشی را که اخیراً
26
00:01:30,310 –> 00:01:33,610
دیدید بررسی کنم، بنابراین ابتدا از تی op
27
00:01:33,610 –> 00:01:39,750
ما این دو خط را داریم، این دو خط در حال
28
00:01:39,750 –> 00:01:42,940
وارد کردن ماژول های مختلف به کدی هستند
29
00:01:42,940 –> 00:01:46,000
که ربات را اجرا می کند، اکنون نحوه دقیق
30
00:01:46,000 –> 00:01:47,470
عملکرد این شیرها چندان
31
00:01:47,470 –> 00:01:49,210
مهم نیست، اما آنچه شما باید بدانید
32
00:01:49,210 –> 00:01:51,159
این است که اگر چیزی در
33
00:01:51,159 –> 00:01:53,920
مورد ربات میخ دار وجود دارد. که میخواهید از
34
00:01:53,920 –> 00:01:56,560
آن استفاده کنید، مطمئن شوید که موتورها
35
00:01:56,560 –> 00:01:58,180
یا سنسور خاصی را پرسیدهاید، باید مطمئن
36
00:01:58,180 –> 00:02:00,850
شوید که در اینجا وارد شده است،
37
00:02:00,850 –> 00:02:04,810
بنابراین اغلب اوقات نرمافزار spike به
38
00:02:04,810 –> 00:02:06,549
طور خودکار این خطوط را برای
39
00:02:06,549 –> 00:02:07,990
شما ایجاد میکند تا نگران نباشید. در مورد آن خیلی زیاد است،
40
00:02:07,990 –> 00:02:11,080
بنابراین اکنون اجازه دهید به قسمت بیشتری
41
00:02:11,080 –> 00:02:14,230
از کدهای اینجا بپردازیم، باید
42
00:02:14,230 –> 00:02:15,879
مقداردهی اولیه را برای راه اندازی
43
00:02:15,879 –> 00:02:20,090
موتورهایی انجام دهیم که از این
44
00:02:20,090 –> 00:02:21,650
موتور بزرگ مالیات استفاده می کنیم تا بگوییم که در حال
45
00:02:21,650 –> 00:02:23,599
ایجاد یک شی موتور در آن
46
00:02:23,599 –> 00:02:25,400
سیستم موتور هستیم. قاب شما به موتوری اشاره دارد
47
00:02:25,400 –> 00:02:28,400
که به پورت C وصل شده است و سپس
48
00:02:28,400 –> 00:02:30,650
در اینجا ما این موتور را به سمت چپ نامگذاری می کنیم،
49
00:02:30,650 –> 00:02:33,170
اکنون لازم نیست آنها را چپ و راست نام گذاری کنید،
50
00:02:33,170 –> 00:02:33,349
51
00:02:33,349 –> 00:02:34,520
من این کار را انجام می دهم بنابراین برای من آسان است که به
52
00:02:34,520 –> 00:02:36,410
یاد بیاورم که این کشتی موتوری است
53
00:02:36,410 –> 00:02:38,420
. ست موتور و این یکی است
54
00:02:38,420 –> 00:02:40,400
که سمت راست را کنترل می کند اما اینها را می توان
55
00:02:40,400 –> 00:02:43,819
هر چیزی نامید بنابراین ما موتور سمت چپ خود را
56
00:02:43,819 –> 00:02:45,319
داریم که می دانیم
57
00:02:45,319 –> 00:02:48,140
به پورت C در موتور سمت راست ما وصل
58
00:02:48,140 –> 00:02:51,549
می شود و می دانیم که به پورت D وصل می شود
59
00:02:51,549 –> 00:02:54,290
اکنون ما همچنین می خواهیم خیلی به او بگویید که
60
00:02:54,290 –> 00:02:56,630
چقدر می خواهیم اینجا
61
00:02:56,630 –> 00:02:58,700
بچرخد، من 490 را تنظیم نکرده ام، همچنین می توانم
62
00:02:58,700 –> 00:03:01,730
این عدد را به 30 تغییر دهم تا آن را به 30 تبدیل کنم.
63
00:03:01,730 –> 00:03:03,950
64
00:03:03,950 –> 00:03:09,110
65
00:03:09,110 –> 00:03:11,480
ژیروسکوپ را راه اندازی کنید اکنون
66
00:03:11,480 –> 00:03:14,510
این برای این
67
00:03:14,510 –> 00:03:15,950
نرم افزار خاص مهم نیست زیرا
68
00:03:15,950 –> 00:03:17,569
ما فقط یک بار می چرخیم و هر زمان
69
00:03:17,569 –> 00:03:19,519
که ربات را راه اندازی می کنید صفر است زاویه اولیه
70
00:03:19,519 –> 00:03:22,730
همیشه صفر خواهد بود اما اگر
71
00:03:22,730 –> 00:03:25,760
می خواهید بگویید از این دو بار استفاده کنید یک ردیف
72
00:03:25,760 –> 00:03:28,250
بدون راهاندازی مجدد برنامه،
73
00:03:28,250 –> 00:03:30,170
باید مطمئن شوید که
74
00:03:30,170 –> 00:03:32,540
هر زاویهای را که در حال حاضر در آن هستید به دست
75
00:03:32,540 –> 00:03:36,769
میآورید تا آن را به عنوان صفر مؤثر خود تعیین کنید، زیرا
76
00:03:36,769 –> 00:03:39,739
اگر سی درجه بچرخم و سپس بگویم
77
00:03:39,739 –> 00:03:42,530
که میخواهم بچرخم تا زمانی که دوباره در
78
00:03:42,530 –> 00:03:45,709
سی درجه هستم به هیچ وجه نمی
79
00:03:45,709 –> 00:03:47,120
چرخد زیرا قبلاً به آن
80
00:03:47,120 –> 00:03:49,280
قطه رسیده است ، به طور خودکار بر
81
00:03:49,280 –> 00:03:53,000
ی شما تنظیم مجدد نمی شود بنابراین در اینجا من زاویه اولیه خود را دریافت می کنم و س
82
00:03:53,000 –> 00:03:56,600
س در اینجا Inglo
83
00:03:56,600 –> 00:03:57,859
فعلی خود را روی زاویه اولیه خود تنظیم می کنم زیرا ما در
84
00:03:57,859 –> 00:03:58,970
روع برنامه هستیم. هی
85
00:03:58,970 –> 00:04:00,230
چیزی را جابجا نکردهام، بنابراین من در حال حاضر با
86
00:04:00,230 –> 00:04:03,680
روشی روبرو هستم که شروع کردم، اکنون
87
00:04:03,680 –> 00:04:08,630
بالاخره میچرخیم، بنابراین برای انجام این کار از یک حلقه while استفاده میکنیم
88
00:04:08,630 –> 00:04:10,850
تا به این ترتیب ما بچرخیم
89
00:04:10,850 –> 00:04:13,910
در حالی که این عبارت در اینجا درست است و
90
00:04:13,910 –> 00:04:15,200
آنچه میگوییم آیا میخواهیم
91
00:04:15,200 –> 00:04:17,089
مطمئن شویم که Y فعلی ما منهای
92
00:04:17,089 –> 00:04:19,940
انحراف اولیهمان است، بنابراین زاویه فعلی
93
00:04:19,940 –> 00:04:21,440
ما که با آن چرخیدهایم مقدار اولیهای است
94
00:04:21,440 –> 00:04:23,240
که میچرخانیم کمتر از
95
00:04:23,240 –> 00:04:27,470
مقداری است که میخواهیم بچرخانیم، در حالی که
96
00:04:27,470 –> 00:04:28,640
این درست است، یعنی ما
97
00:04:28,640 –> 00:04:31,700
به چرخش um ادامه می دهیم و در اینجا می خواهیم
98
00:04:31,700 –> 00:04:33,200
Y فعلی را به روز کنیم
99
00:04:33,200 –> 00:04:35,2