در این مطلب، ویدئو چگونه یک دکمه به پروژه Raspberry Pi Python خود اضافه کنید با زیرنویس فارسی را برای دانلود قرار داده ام. شما میتوانید با پرداخت 15 هزار تومان ، این ویدیو به علاوه تمامی فیلم های سایت را دانلود کنید.اکثر فیلم های سایت به زبان انگلیسی می باشند. این ویدئو دارای زیرنویس فارسی ترجمه شده توسط هوش مصنوعی می باشد که میتوانید نمونه ای از آن را در قسمت پایانی این مطلب مشاهده کنید.
تصاویر این ویدئو:

قسمتی از زیرنویس این فیلم:
00:00:00,000 –> 00:00:02,340
سلام.
2
00:00:02,340 –> 00:00:03,990
3
00:00:03,990 –> 00:00:05,850
4
00:00:05,850 –> 00:00:07,170
5
00:00:07,170 –> 00:00:08,790
6
00:00:08,790 –> 00:00:10,650
7
00:00:10,650 –> 00:00:13,049
بنابراین قبل از اینکه جلوتر برویم،
8
00:00:13,049 –> 00:00:13,889
بیایید ببینیم چه چیزی برای این پروژه نیاز دارید،
9
00:00:13,889 –> 00:00:16,170
بنابراین ما به یک Raspberry Pi نیاز داریم
10
00:00:16,170 –> 00:00:17,730
و همچنین به یک
11
00:00:17,730 –> 00:00:19,710
کارت SD با سیستم عامل raspbian
12
00:00:19,710 –> 00:00:21,630
روی آن نیاز داریم، مهم نیست که کدام PI را دارید.
13
00:00:21,630 –> 00:00:23,550
برای این کار به یک
14
00:00:23,550 –> 00:00:27,060
LED و یک مقاومت 220 اهمی نیز نیاز خواهید داشت، می توانید از
15
00:00:27,060 –> 00:00:28,470
یک مقاومت با ارزش بالاتر استفاده کنید، اما هر
16
00:00:28,470 –> 00:00:29,849
چه مقدار مقاومت بیشتر باشد،
17
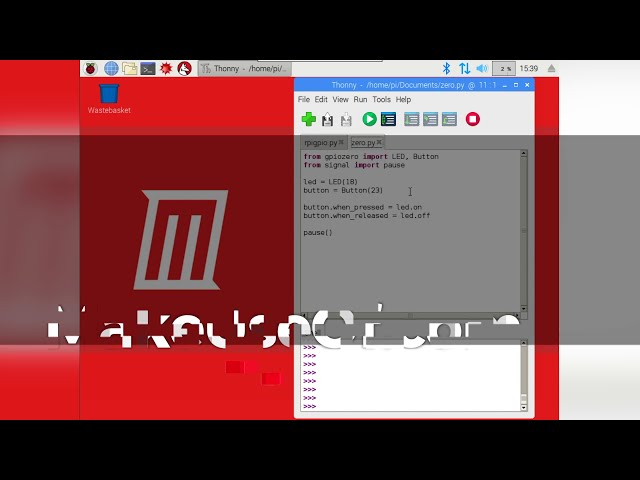
00:00:29,849 –> 00:00:32,189
LED شما کم نور می شود،
18
00:00:32,189 –> 00:00:33,809
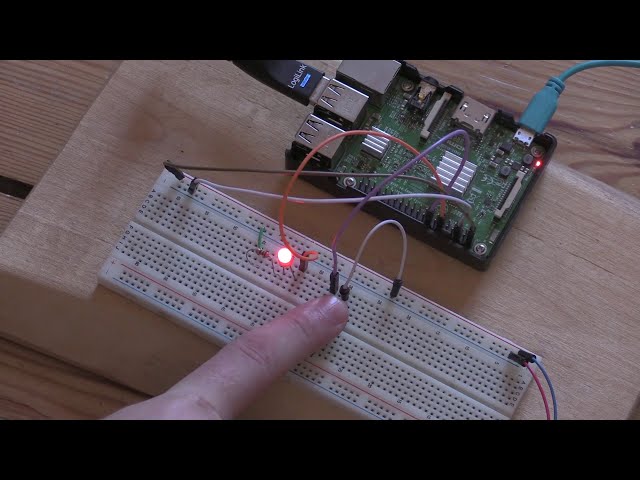
به یک دکمه فشاری نیاز خواهید داشت. برای راهاندازی مدار به یک
19
00:00:33,809 –> 00:00:36,149
تخته نان و چند سیم برای وصل
20
00:00:36,149 –> 00:00:37,680
کردن همه آن به همراه منبع تغذیه رزبری پای خود نیاز دارید تا پایههای
21
00:00:37,680 –> 00:00:40,140
22
00:00:40,140 –> 00:00:42,120
5 ولتی و زمینی
23
00:00:42,120 –> 00:00:44,250
رزبری پای را به
24
00:00:44,250 –> 00:00:47,430
ریل مثبت و منفی روی برد وصل
25
00:00:47,430 –> 00:00:50,160
کنید و پایه مثبت را متصل کنید. از LED به پین 12 که
26
00:00:50,160 –> 00:00:52,980
PIO 18 و پا
27
00:00:52,980 –> 00:00:55,289
منفی LED از طریق یک مقاومت به
28
00:00:55,289 –> 00:00:58,440
ریل زمین می رود و سپس پایه 16 که
29
00:00:58,440 –> 00:01:00,750
GPIO 23 است به یک طرف
30
00:01:00,750 –> 00:01:02,520
دکمه می رود و طرف دیگر دکمه به زمین می رود
31
00:01:02,520 –> 00:01:05,280
اگر شما می خواهید نموداری از
32
00:01:05,280 –> 00:01:06,420
این هد به قسمت اصلی نشان دهید. از
33
00:01:06,420 –> 00:01:08,369
وب سایتی استفاده کنید که در آن این آموزش نیز به
34
00:01:08,369 –> 00:01:10,140
صورت متنی است و به این ترتیب
35
00:01:10,140 –> 00:01:11,520
خواهید دید که در آنجا یک نمودار فریتزینگ به
36
00:01:11,520 –> 00:01:13,320
همراه شرح مفصلی در مورد
37
00:01:13,320 –> 00:01:15,540
نحوه راه اندازی مدار شما پس از اتمام
38
00:01:15,540 –> 00:01:17,070
راه اندازی مدار شما وجود دارد و کاملاً
39
00:01:17,070 –> 00:01:18,360
از همه چیز مطمئن شوید. در جای مناسب است
40
00:01:18,360 –> 00:01:20,280
و سپس منبع تغذیه خود را وصل کنید و
41
00:01:20,280 –> 00:01:23,280
PI خود را بوت کنید و اینجا در
42
00:01:23,280 –> 00:01:25,049
دسکتاپ Raspberry Pi هستیم، بنابراین
43
00:01:25,049 –> 00:01:27,689
برای آموزش امروز از funny استفاده می کنیم، بنابراین به
44
00:01:27,689 –> 00:01:29,220
سر منوی زیر برنامه نویسی بروید
45
00:01:29,220 –> 00:01:32,310
و Python IDE خنده دار را انتخاب کنید و منتظر بمانید.
46
00:01:32,310 –> 00:01:34,890
برای راهاندازی اولین طرحی که
47
00:01:34,890 –> 00:01:37,290
میخواهیم بسازیم این است که از کتابخانه RPI 2 GPIO
48
00:01:37,290 –> 00:01:39,900
برای کنترل دکمهمان استفاده کنیم، بنابراین
49
00:01:39,900 –> 00:01:41,490
من کد را در آن پست میکنم
50
00:01:41,490 –> 00:01:44,220
و خط به خط آن را مرور میکنیم تا شروع کنیم.
51
00:01:44,220 –> 00:01:47,369
ما کتابخانه RPI GPIO را وارد می کنیم و ما
52
00:01:47,369 –> 00:01:50,100
حالت را طوری تنظیم کنید که ما از برد GPIO استفاده می کنیم، به
53
00:01:50,100 –> 00:01:52,170
این معنی که اگر به سمت راست
54
00:01:52,170 –> 00:01:55,079
اینجا در این نمودار پین بیرون نگاه کنید،
55
00:01:55,079 –> 00:01:57,360
این اعداد پین ها هستند نه
56
00:01:57,360 –> 00:01:59,909
اعداد GPIO، بنابراین این بار
57
00:01:59,909 –> 00:02:01,890
از اعداد وابسته استفاده می کنیم که برنده شده ایم. بعدا
58
00:02:01,890 –> 00:02:03,390
نباشید و توضیح خواهم داد که چرا وقتی به آن رسیدیم،
59
00:02:03,390 –> 00:02:04,890
اما این بار قبلاً این کار را
60
00:02:04,890 –> 00:02:06,270
برای آخرین آموزش انجام دادهایم، پس بیایید
61
00:02:06,270 –> 00:02:09,209
فعلاً به آن بپردازیم تا پین LED ما
62
00:02:09,209 –> 00:02:10,770
بدانیم شماره 12 است، جایی که ما led خود را وصل کردیم.
63
00:02:10,770 –> 00:02:12,690
در و پین دکمه ما شماره
64
00:02:12,690 –> 00:02:13,860
16 است،
65
00:02:13,860 –> 00:02:15,780
بنابراین آنها اکنون اعلام شده اند و ما می توانیم
66
00:02:15,780 –> 00:02:18,960
پین های GPIO خود را تنظیم کنیم و اکنون پین های GPIO خود را تنظیم کنیم،
67
00:02:18,960 –> 00:02:21,390
بنابراین برای شروع با
68
00:02:21,390 –> 00:02:23,220
پین led پخش کننده سوت شروع می کنیم و این باید
69
00:02:23,220 –> 00:02:24,600
تا کنون برای شما کاملاً استاندارد باشد. فقط
70
00:02:24,600 –> 00:02:27,270
پین LED را بهعنوان یک GPIO خروجی تنظیم کنید
71
00:02:27,270 –> 00:02:29,490
و پین دکمه کاملاً مشابه شروع میشود،
72
00:02:29,490 –> 00:02:31,710
در این زمان ما یک ورودی میخواهیم
73
00:02:31,710 –> 00:02:34,500
بنابراین نقطه GPIO وارد شود، اما این قسمت در اینجا
74
00:02:34,500 –> 00:02:36,450
جایی است که ما
75
00:02:36,450 –> 00:02:39,060
مقاومت کششی روی Raspberry Pi را تنظیم میکنیم.
76
00:02:39,060 –> 00:02:40,320
مهم نیست که در این مرحله به طور کامل این را درک نکرده باشید، تنها
77
00:02:40,320 –> 00:02:41,700
چیزی که باید
78
00:02:41,700 –> 00:02:44,280
بدانید Raspber است پینهای ry Pi در اطراف شناور
79
00:02:44,280 –> 00:02:46,890
هستند و قطعی بالا یا پایین نیستند و
80
00:02:46,890 –> 00:02:48,750
بنابراین با بالا کشیدن آن به این معنی است که
81
00:02:48,750 –> 00:02:50,640
پین بالا باقی میماند تا زمانی که دکمه را فش
82
00:02:50,640 –> 00:02:53,340
ر دهیم و اکنون باید حل
83
00:02:53,340 –> 00:02:54,870
ه برنامه خود را تنظیم کنیم تا مد
84
00:02:54,870 –> 00:02:56,430
ی تنظیم کنیم. true که اساساً فقط یک
85
00:02:56,430 –> 00:02:58,320
حلقه بی نهایت است و هر بار که حلقه می شود ما
86
00:02:58,320 –> 00:03:00,510
به وضعیت دکمه نگاه می کنیم اکنون
87
00:03:00,510 –> 00:03:02,280
این یک متغیر جدید است که در هر حلقه تنظیم می شود
88
00:03:02,280 –> 00:03:04,020
بنابراین هر بار که حلقه دور
89
00:03:04,020 –> 00:03:05,400
می شود حالت دکمه تبدیل به اتفاقی می شود که
90
00:03:05,400 –> 00:03:07,230
روی پین دکمه اتفاق می افتد.
91
00:03:07,230 –> 00:03:09,239
به دلیل بالا بودن مقاومت pull-up
92
00:03:09,239 –> 00:03:12,239
به محض فشردن دکمه،
93
00:03:12,239 –> 00:03:13,709
دکمه پایین میآید و اینجاست که
94
00:03:13,709 –> 00:03:15,810
اگر دکمه مساوی باقی بماند،
95
00:03:15,810 –> 00:03:17,940
اشتباه است و اتفاقاً در این مثال
96
00:03:17,940 –> 00:03:20,580
false میتواند صفر باشد یا حتی میتواند
97
00:03:20,580 –> 00:03:23,940
نقطه GPIO باشد. پایین در پایتون منظورشان
98
00:03:23,940 –> 00:03:28,680
یکسان است وقتی این اتفاق میافتد GPIO برای
99
00:03:28,680 –> 00:03:31,440
خروجی پین LED بالا، بنابراین دکمه
100
00:03:31,440 –> 00:03:34,080
فشار داده میشود، چراغ روشن میشود، در غیر این صورت اگر
101
00:03:34,080 –> 00:03:37,470
نادرست نیست،
102
00:03:37,470 –> 00:03:39,810
حالا اگر فایل را ذخیره نکردهاید، حالا چراغ را خاموش کنید، بنابراین
103
00:03:39,810 –> 00:03:41,760
من میروم. برای نجات این یکی به عنوان یک RPI
104
00:03:41,760 –> 00:03:43,709
GPIO زیرا این کتابخانه ای است که ما استفاده کرده ایم
105
00:03:43,709 –> 00:03:45,299
و مطمئن شوید که یک فایل پایتون است و
106
00:03:45,299 –> 00:03:4