

در این مقاله قصد داریم شتاب سنج GY-521 را با آردوینو رابط کنیم. GY-521 دارای تراشه InvenSense MPU6050 است که شامل یک شتاب سنج 3 محوره و یک ژیروسکوپ 3 محوره است. این باعث می شود آن را به یک IMU 6 DOF (واحد اندازه گیری اینرسی 6 درجه آزادی) تبدیل کند. این تراشه همچنین شامل یک مبدل 16 بیتی آنالوگ به دیجیتال در هر کانال و یک واحد DMP (پردازنده حرکت دیجیتال) است. واحد DMP وظیفه ترکیب داده های خام و انجام برخی محاسبات برای حذف خطاهای هر سنسور را بر عهده دارد.
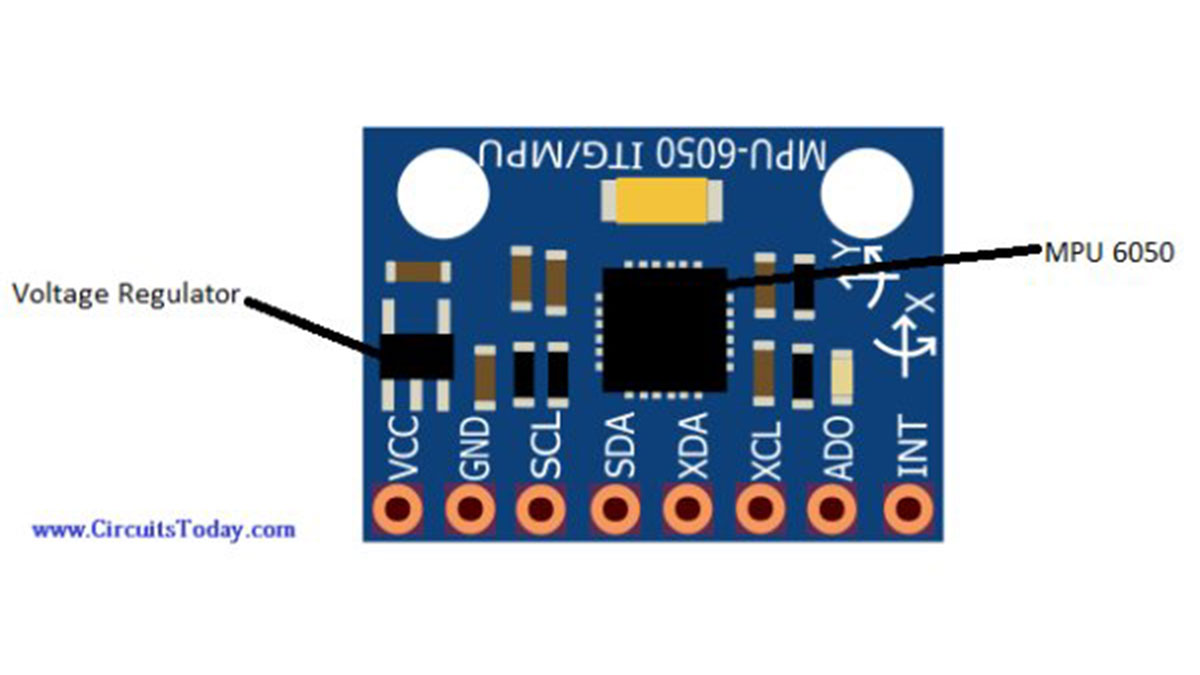
نمودار پین کردن - GY-521
برد برد GY-521 در مجموع دارای 8 پین است که به شرح زیر است:
VCC: پین 5 ولت یا 3.3 ولت
GND: پین زمین
SCL (خط ساعت سریال): مسئول ارتباطات اولیه I2C
SDA (خط داده سریال): مسئول ارتباطات اولیه I2C
XCA (خط ساعت کمکی): مسئول ارتباطات کمکی I2C
XDL (خط داده کمکی): مسئول ارتباطات کمکی I2C
ADO: مسئول رابط Slave یا Master است
INT: پین وقفه
برد برک آوت دارای یک تنظیم کننده ولتاژ برای تبدیل سطح ولتاژ از 5 ولت به 3.3 ولت است و همچنین دارای تراشه InvenSense MPU6050 است که حسگرهای شتاب سنج و ژیروسکوپ را در خود جای می دهد.
مشخصات فنی
مشخصات GY-521 MPU6050 به شرح زیر می باشد
