

کنترل یک بازوی رباتیک برای برداشتن و انداختن اشیا به اندازه کافی دشوار است، بدون اینترنت اشیا انجام این کار از راه دور تقریبا غیرممکن خواهد بود.
موارد استفاده شده در این پروژه
قطعات سخت افزاری |
||||||
 |
|
× | 1 | |||
برنامه های نرم افزاری و خدمات آنلاین |
||||||
 |
|
|||||
 |
|
|||||
ابزار دستی و ماشین آلات ساخت |
||||||
 |
|
|||||
داستان
معرفی
من واقعاً می خواستم سعی کنم طراحی یک بازوی رباتیک را به طور کامل از ابتدا انجام دهم. طرحهای متنباز بسیاری در دسترس هستند، اما فکر میکردم خوشحالکننده خواهد بود اگر بتوانم از هیچ طراحی، بسازم و برنامهنویسی کنم (و اینطور هم شد).
من در مورد هر دو مرحله طراحی و برنامه نویسی صحبت خواهم کرد. اما من بیشتر روی جنبه برنامه نویسی تمرکز خواهم کرد زیرا فقط کنترل زوایای سروو نیست.
در اینجا پیوندی به ویدیوی پروژه نهایی در حال انجام است - https://www.mathworks.com/videos/how-to-control-a-robotic-arm-from-a-remote-location-using-iot-1538564659095. html
من از Simulink برای برنامه ریزی Arduino MKR1000 استفاده کردم که MCU بازوی رباتیک را کنترل می کند. سپس توانایی کنترل بازوی ربات را از طریق ThingSpeak، یک پلتفرم باز اینترنت اشیا با تجزیه و تحلیل متلب، اضافه کردم.
سخت افزار مورد نیاز
- تخته سه لا 15 اینچ 20 اینچ 1/8 اینچ
- آردوینو MKR1000
- سروو 5x GS9025MG
- جک بشکهای 2.1 میلیمتری تخته نرد DC
- منبع تغذیه جک بشکه ای 6 ولت DC
- سیم های جامپر
- 3 x 2n2222a ترانزیستور
- مهره 10x M2
- پیچ 10 x M2 x 10
- مهره 40x M3
- پیچ 40 x M3 x 25
نرم افزار استفاده شده
- متلب
- سیمولینک
- بسته پشتیبانی متلب برای سخت افزار آردوینو
- بسته پشتیبانی سیمولینک برای سخت افزار آردوینو
- بسته پشتیبانی متلب برای ThingSpeak
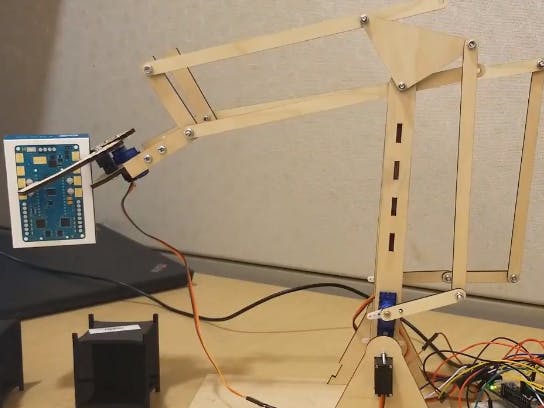
طرح
من می خواستم هزینه قطعات را پایین نگه دارم، بنابراین این را برای سرووهای سرگرمی، به ویژه مدل GS-9025MG طراحی کردم. این بدان معنی بود که وزن و اندازه نهایی محدود بود. این به این دلیل بود که میکرو سرووها نمی توانستند گشتاور زیادی اعمال کنند و در نتیجه نمی توانند بازوهای اهرمی سنگین را بلند کنند.
من نمونه اولیه را با تخته سه لا 1/4 اینچی امتحان کردم که برای سرووها خیلی سنگین بود. من طول بازوها را کاهش دادم و از تخته سه لا 1/8 اینچی استفاده کردم و مشکل کنترل سروو حل شد. من طرح را با استفاده از Fusion 360 ترسیم کردم و طرح را به صورت فایل a.dxf دانلود کردم و سپس آن را با لیزر برش دادم.
