

به عنوان یک مبتدی، من برای پیدا کردن مجموعهای از دستورالعملهای یک مرحلهای برای راهاندازی و راهاندازی با موتور درایور Sparkfun 1A Dual TB6612FNG تلاش کردم . این برد خروجی درایور موتور دارای ارزش استثنایی است، به زیبایی کوچک است، اما برای کارکردن به کمی تلاش بیشتری نیاز دارد.
TB6612FNG یک درایور H-Bridge است – من به جزئیات فنی نحوه کار آن نمی پردازم ، اما نتیجه نهایی این است که می تواند یک موتور متصل را در هر جهت و با سرعت متغیر بچرخاند. این به شما اجازه می دهد تا یک ربات بسیار چابک با دو موتور بسازید که می تواند:
– حرکت به جلو
– به عقب
– چرخش در یک دایره بسیار تنگ با حرکت یک موتور به جلو و یک موتور در معکوس
– انواع حرکات دیگر با استفاده از سرعت های دیفرانسیل موتور و جهت ها
برای اینکه این ربات را بر روی راننده متمرکز نگه دارم، ربات را بر روی بدنه ساده مککانو ساختهام و آن را به گونهای گسترش ندادهام که هیچ گونه تشخیص مانعی را شامل شود - ربات فقط یک الگوی تنظیم را هدایت میکند.
قبل از شروع – مشخصات درایور:
– ولتاژ منبع تغذیه منطقی (VCC) 2.7-5.5 VDC
– ولتاژ تغذیه موتور (VM) تا tp 15VDC
– جریان ثابت 1.2 آمپر در هر کانال (پیک 3.2 آمپر)
– تا 2 موتور را درایو می کند
تصاویر:
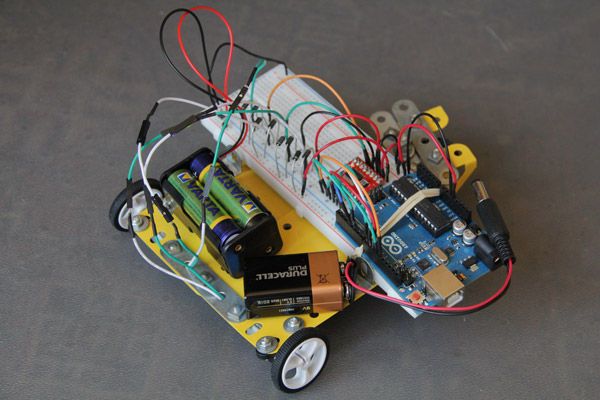
1. ربات تمام شده
2. برد شکست TB6612FNG
3. نمودار مدار کامل
مرحله 1: وسایل خود را دریافت کنید
اول: مواد تشکیل دهنده
– 1 عدد درایور موتور Sparkfun 1A Dual TB6612FNG
– 1 عدد پین هدر
– 1 عدد تخته نان به همراه سیم اتصال
– 8 عدد دیود یکسو کننده 1N4001 (یا مشابه)
– 1 عدد آردوینو Uno R3
– 1 عدد منبع تغذیه 6 ولت من از 4 x 1.2 ولت قابل شارژ NiMH در یک نگهدارنده استفاده کردم)
- باتری 1 x 9 ولت با یک کانکتور بشکه ای 2.1 میلی متری
- 2 موتور DC که از جریان و ولتاژ راننده تجاوز نمی کند (من از گیربکس فلزی میکرو 250:1 پولولو برای RPM قابل کنترل آنها استفاده کردم و گشتاور بالا) – براکتها و چرخهای نصب (من از براکتهای گیربکس توسعه یافته Pololu و چرخهای 32×7
استفاده کردم – چرخهای کوچک = سرعت قابل کنترل) – چیزی برای ساخت بدنه (مکانو، لگو، کارتهای راه راه ضخیم و غیره)
دوم: ظروف پخت و پز
- آهن لحیم کاری
- لحیم کاری با هسته رزینی
- سیم کش
مرحله 2: اتصالات خود را لحیم کنید
قبل از شروع باید چند اتصال را لحیم کنید. من متوجه شدم که کار لحیم کاری بسیار دلهره آور است، اما راندوفو How-To بسیار کمک کرد - همراه با دوز خوب تمرین روی برخی از تخته های قدیمی که در اطراف آن دراز کشیده بودم.
برد برک آوت
TB6612FNG بدون پین ارائه می شود – بنابراین باید خودتان را لحیم کنید.
2 مجموعه از 8 پین هدر را با استفاده از انبردست از روی نوار جدا کنید تا روی پین سمت راست شکسته شود. پینهای هدر را در یک تخته نان قرار دهید و سپس تخته برشآت را روی آن قرار دهید - این کار باعث میشود که فاصله مناسب و زاویه 90 درجه بین برد و پایههای هدر وجود داشته باشد. من همچنین از play-doh برای نگه داشتن پین ها در جای خود استفاده کرده ام (play-doh ذوب نمی شود، به سادگی ترد می شود و می توان آن را جدا کرد). از کار لحیم کاری نه چندان خوب من خواهید دید که من هنوز دارم با آهن لحیم کاری خود دست و پنجه نرم می کنم!
اتصالات باتری – باتری موتور موتور
از یک منبع 6 ولت جداگانه خارج می شود. بسته به نوع کانکتوری که برای نگهدارنده باتری خود دارید، ممکن است لازم باشد پینهای هدر را روی سیمها لحیم کنید - نیروی موتور به تخته نان وصل میشود. (برد برک آوت دارای خازن هایی روی برد است که نویز موتور را جدا می کند، بنابراین نیازی به اضافه کردن آنها نیست)
اتصالات باتری – باتری آردوینو
آردوینو باتری 9 ولتی را خالی می کند، بنابراین نیازی به اتصال به کابل USB نیست. بسته به کانکتور/هولدری که دارید، ممکن است لازم باشد یک کانکتور بشکه ای 2.1 میلی متری را روی سرب ها لحیم کنید (مطمئن شوید که پین مرکزی به سرب مثبت لحیم شده است). یا یک نگهدارنده با کانکتور از قبل وصل شده بخرید.
پایانه های موتور
در نهایت، سیم ها را به پایانه های موتورها لحیم کنید. من از سیم های جامپر استفاده کردم، یک سر آن را جدا کردم و آن را روی موتور لحیم کردم. به این ترتیب، شما پین هایی برای اتصال موتور به تخته نان در اختیار دارید.
