

این آموزش کامل نیست، به زودی کد را ارسال خواهم کرد
بازو:
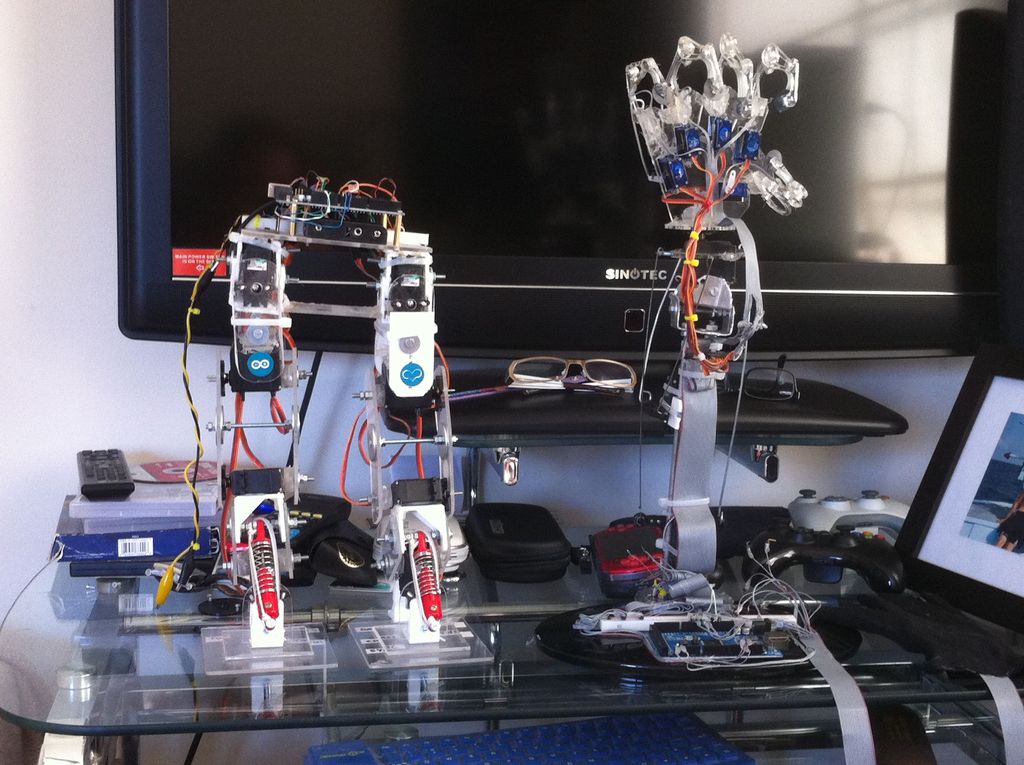
این دستورالعمل روند ساخت یک بازوی رباتیک را با استفاده از سرووها، ریزپردازنده آردوینو، ژیروسکوپ و حسگرهای خم متعدد نشان می دهد.
کاربر یک دستکش حاوی ژیروسکوپ و سنسورهای خم میپوشد که حرکت دست کاربر را به حرکت سرووها تبدیل میکند و به نوبه خود مچ و دست بازوی رباتیک را میچرخاند.
ساعد دارای حرکت کامل مچ دست انسان است که عبارتند از: چرخش، انحراف شعاعی (حرکت به سمت انگشت شست)، انحراف اولنار (حرکت به سمت انگشت کوچک)، خم شدن (کج شدن به سمت کف دست) و امتداد (انحراف به سمت پشت دست). .
دست همچنین دارای حرکت انگشتان است که در نتیجه مواد شکننده استفاده شده محدود می شود.
تمام حرکات توسط سرووهای متصل به سیم کششی یا سیم پیانو ارائه می شود. هر کدام بسته به موقعیت خود گشتاور متفاوتی دارند.
انگشتان دارای مقاومتهای حساس به لمس هستند که بازخورد لمسی را ارائه میدهند و به کاربر اجازه میدهند بدانند که انگشتان چه زمانی یک شی را گرفتهاند.
مرحله 1: طراحی
تصاویری از طرح با استفاده از «google sketchup» پیوست شده است.
من این طرح انگشت را بر روی تور پیدا کردم که به یک سروو اجازه می دهد تا حرکت کامل حلقه کردن انگشت انسان را ارائه دهد. این طرح زمانی بهترین کار را انجام می دهد که از آلومینیوم برای برش انگشتان استفاده شود، اما چون perspex در دسترس داشتم، رفتم. با گزینه ضعیف تر که منجر به شکننده شدن انگشتان می شود.
همه انگشتان طراحی مشابهی دارند اما اندازههای متفاوتی دارند، به جز انگشت شست. آنها را می توان در زیر یافت:
