

آیا تا به حال خواسته اید یک ربات یا ماشین کنترل شده اندروید بسازید؟ ماشین RC خود را با گوشی هوشمند کنترل کنید؟ یا یک آموزش در مورد دستگاه های متصل و شروع کار با آن می خواهید؟ اکنون می توانید این کار را با این هک DIY ساده انجام دهید که حتی یک برنامه اندروید رایگان را در اختیار شما قرار می دهد، بنابراین نیازی به داشتن تجربه در برنامه نویسی برنامه اندرویدی ندارید. برنامه رایگان را در گوشی خود دانلود کنید و شروع به کنترل ربات خود کنید. با این آموزش هک DIY لذت ببرید!
مواد مورد نیاز
سخت افزار:
- آردوینو / آردوینو کلون کنید یا برد آردوینو سفارشی خود را بسازید .
- دو سروو موتور با چرخش پیوسته مانند این: سروو چرخش پیوسته
- یک ماژول بلوتوث 5v TTL -UART مانند: JY-MCU BT_BOARD (ارزانتر) یا Bluesmirf Gold/Silver
- کاستور توپ
- دو چرخ ربات مانند این، چرخها را پس از بررسی اینکه آیا در سروو جا میشوند یا نه انتخاب کنید: چرخهای ربات
- شاسی، معمولا یک تخته اکریلیک کوچک انجام می دهد.
- چهار باتری AA Duracell و نگهدارنده باتری.
نرم افزار :
- آردوینو IDE
- Eclipse برای برنامه نویسی اندروید (اختیاری، غیر ضروری). برای آموزش نصب و راه اندازی محیط، نحوه نصب اندروید و اکلیپس و آموزش را بخوانید تا شروع به یادگیری برنامه نویسی اندروید کنید حتی اگر برای این پروژه نیازی به آن ندارید.
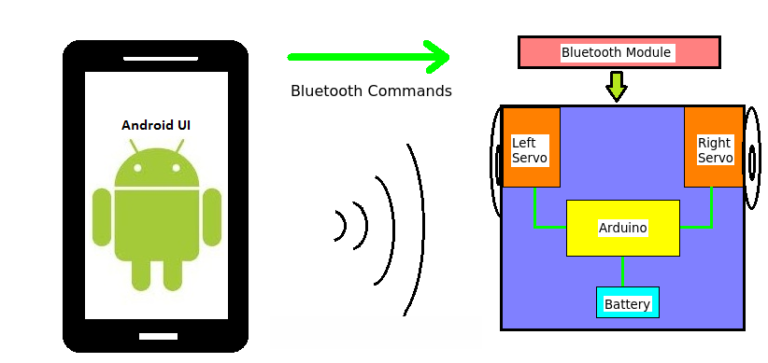
چگونه کار می کند؟
ربات کنترل شده برنامه اندروید از طریق بلوتوث با ماژول بلوتوث موجود بر روی ربات ارتباط برقرار می کند. با فشار دادن هر دکمه روی برنامه، دستورات مربوطه از طریق بلوتوث برای ربات ارسال می شود. دستوراتی که ارسال می شود به صورت اسکی هستند. سپس آردوینو روی ربات فرمان دریافتی را با دستورات تعریف شده قبلی خود بررسی می کند و موتورهای سروو را بسته به فرمان دریافتی کنترل می کند تا باعث حرکت به جلو، عقب، چپ، راست یا توقف شود. بنابراین به ما این امکان را می دهد که یک ربات کنترل شده با اندروید ایجاد کنیم. بلوک دیاگرام اصلی:
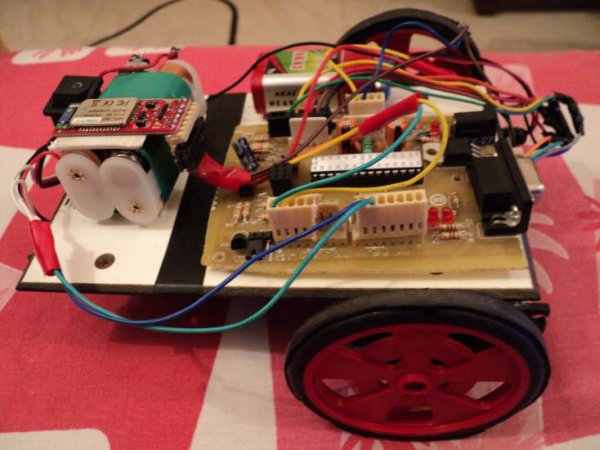
مونتاژ اجزای ربات کنترل شده اندروید
تکه تخته اکریلیک را بردارید و سروو موتورها را با استفاده از چسب داغ/چسب فوق العاده به لبه های چپ و راست بچسبانید. سپس کاستور توپ را وصل کنید. در سمت بالا، برد آردوینو را با استفاده از چسب دو طرفه بچسبانید، همین کار را برای نگهدارنده باتری نیز انجام دهید.
راه اندازی اتصالات برای ربات کنترل شده اندروید
اتصالات سخت افزاری را با آردوینو و موتورهای سروو تنظیم کنید. سروو موتورهای چرخش پیوسته آن دسته از موتورهای سروو هستند که بر خلاف سرووهای معمولی نمی توان آنها را کنترل یا در یک زاویه خاص تنظیم کرد. سرووها دارای سه سیم هستند که از آنها خارج می شود: سیگنال قرمز- توان، سیاه - زمین، سفید/زرد- سیگنال PWM / PPM. سروو موتور سمت چپ (سیم سفید/زرد) به پین دیجیتال آردوینو 9 و سروو موتور سمت راست (سیم سفید/زرد) پین دیجیتال آردوینو 10 وصل شده است. سیم های مشکی هر دو موتور به آردوینو GND و سیم های قرمز وصل شده اند. به ترمینال مثبت نگهدارنده باتری. پایه RX ماژول بلوتوث را به پایه TX (پایه دیجیتال 1) در آردوینو و پایه TX روی ماژول را به پایه RX در آردوینو (پین 0) وصل کنید. Vcc و Gnd ماژول را به آردوینو وصل کنید. ترمینال منفی نگهدارنده باتری را به آردوینو GND وصل کنید. اتصالات به شکل زیر خواهند بود:
بیشتر بخوانید: با استفاده از پلتفرم آردوینو یک ربات کنترل شده اندروید بسازید
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Ever wanted to make an Android controlled robot or car? Control your RC car with a smartphone? Or wanted a tutorial about connected devices and getting started with it? Now you can do that with this simple DIY hack that even provides you with a free Android application, thus it doesn’t require you to have any experience in Android application programming. Download the free application to your phone and start controlling your robot. Have fun with this DIY hacking tutorial!
