

برف پاک کن خودکار سنجش باران با استفاده از آردوینو
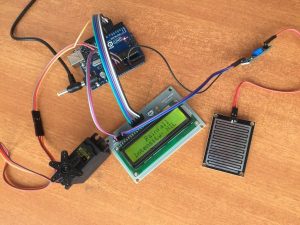
این پروژه برای ساخت یک برف پاک کن خودرو طراحی شده است که به طور خودکار شدت بارندگی را تشخیص داده و فرکانس کار برف پاک کن را تنظیم می کند. این با استفاده از برد آردوینو UNO ساخته شده است. ماژول سنجش باران برای اندازه گیری شدت بارندگی استفاده می شود. و از موتور سروو برای کنترل حرکات برف پاک کن استفاده می شود. یک ماژول LCD نیز برای نمایش شدت بارندگی به کنترلر متصل شده است. کنترل کننده با اندازه گیری میزان بارندگی سرعت سروو موتور را تنظیم می کند. سروو با تولید سیگنال PWM در خط سیگنال خود کنترل می شود.
اهداف پروژه
- اندازه گیری میزان بارندگی.
- نمایش شدت بارندگی در ماژول LCD.
- کنترل سرعت سروو موتور با توجه به خروجی ماژول سنسور.
بیایید شروع به ساخت پروژه خود کنیم - برف پاک کن خودرو با حسگر باران
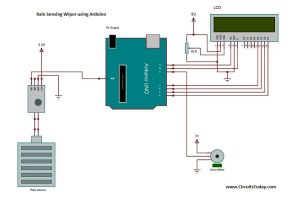
مدار را همانطور که در نمودار نشان داده شده است جمع کنید! اتصالات مهم در زیر توضیح داده شده است.
آشکارساز باران MH-RD ماژول حسگری است که ما در اینجا از آن استفاده می کنیم. ماژول دارای 4 پین است: Vcc، A0، D0 و Gnd. Vcc و Gnd به پایه های تغذیه آردوینو متصل هستند. A0 و D0 به ترتیب پایه های خروجی آنالوگ و دیجیتال ماژول هستند. از آنجایی که ما نیاز به تغییر مداوم در بارندگی داریم، به جای D0 از پین A0 استفاده خواهیم کرد. سپس خروجی آنالوگ از سنسور به یک پایه ورودی آنالوگ آردوینو متصل می شود.
همانطور که قبلا ذکر شد در اینجا از موتور سروو برای حرکت برف پاک کن استفاده می شود. سروو موتور نوعی موتور dc با گشتاور بالا است که شفت آن را می توان با تولید یک سیگنال PWM مناسب در خط سیگنال آن در موقعیت مطلوب تنظیم کرد. در اینجا ما خط سیگنال سروو را به یکی از پایه های PWM آردوینو (یعنی پایه دیجیتال 9) وصل می کنیم. بعدی ماژول LCD است که برای نمایش شدت بارندگی است. رابط آردوینو با LCD 16×2 بسیار ساده است. JHD162A ماژول LCD است که در اینجا استفاده می شود. JHD162A یک ماژول LCD 16×2 بر اساس درایور HD44780 هیتاچی است. JHD162A دارای 16 پین است و می تواند در حالت 4 بیتی (فقط با استفاده از 4 خط داده) یا حالت 8 بیتی (با استفاده از هر 8 خط داده) کار کند. در اینجا ما از ماژول LCD در حالت 4 بیتی استفاده می کنیم. برای تسهیل ارتباط بین آردوینو و ماژول LCD، ما از یک کتابخانه داخلی در آردوینو <LiquidCrystal.h> استفاده می کنیم - که برای ماژول های LCD که از چیپست Hitachi HD44780 (یا یک چیپست سازگار) استفاده می کنند، نوشته شده است. پین کنترل RS، RW و En مستقیماً به پایه 13، GND و 10 آردوینو وصل می شوند و پایه داده D4-D7 به 7،6،5 و 4 آردوینو متصل می شود.
هنگامی که دستگاه روشن می شود، موتور سروو برف پاک کن را در موقعیت صفر درجه قرار می دهد. پس از آن، کنترل کننده به طور مداوم سیگنال ماژول سنجش باران را بررسی می کند. اگر سیگنال ماژول از مقدار حداقل فراتر رود، سروو موتور شروع به کار می کند. سرعت عملکرد سروو با توجه به قدرت سیگنال متفاوت خواهد بود. و شدت بارندگی با توجه به قدرت سیگنال بر روی LCD نمایش داده می شود.
بیشتر بخوانید: برف پاک کن سنسور باران با استفاده از آردوینو و سروو موتور
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Automatic Rain Sensing Wiper Using Arduino
This project is designed to build a car wiper that automatically detects the rainfall intensity and regulates the frequency of wiper operation. It is built, using Arduino UNO board. A rain sensing module is used for measuring the intensity of rainfall. And a servo motor is used for controlling the wiper movements. An LCD module is also attached to the controller for displaying the rainfall intensity. By measuring the amount of rainfall , controller will adjust the speed of servo motor . Servo is controlled by generating PWM signal at its signal line.
