

این یک پروژه مبتنی بر میکروکنترلر Tiva است. از آنجایی که داده های کمتری در مورد پروژه های مبتنی بر تیوا وجود دارد، من به عنوان یک فرد این ابتکار را انجام می دهم. امیدوارم خوانندگان آن را تشویق کنند.
پروژه ای که به عنوان ماشین کنترل صدا و کنترل از راه دور مبتنی بر بلوتوث نامگذاری شده است، پروژه ای است که توسط دانشجویان جوان مهندسی برق در دانشگاه مهندسی و فناوری (UET)، لاهور، پاکستان اجرا شده است. این پروژه بر روی کنترل بی سیم یک ماشین روباتی با استفاده از دستورات صوتی متمرکز شده است.
در این پروژه قصد داریم با دستورات صوتی انسان حرکت خودرو را کنترل کنیم. ایده پشت این پروژه این بود که افراد دارای معلولیت بتوانند به طور موثر وظایفی را در زندگی روزمره خود به سادگی رانندگی با ماشین انجام دهند. این پروژه فقط یک نمایش اولیه از این فناوری است و قبل از اینکه بتوان آن را به مرحله اجرا درآورد، نیاز به توسعه بیشتر دارد. ایده اصلی این است که اتومبیل را به جلو و عقب برانید و از طریق مکانیسم های کنترل صدا به چپ یا راست بپیچید. علاوه بر این، خودرو توانایی تشخیص وجود موانع و تغییر مسیر خود را دارد.
برنامه مورد استفاده برای این برنامه یک برنامه مبتنی بر اندروید است. این برنامه به راحتی در اینترنت در دسترس است و بسیاری از برنامه های کاربردی دیگر مانند این در اینترنت موجود است. با استفاده از اندروید استودیو و سایر نرم افزارهای مرتبط، می توان برنامه های اندرویدی مبتنی بر بلوتوث و کنترل صوتی را نیز ساخت. شما تشویق می شوید که اپلیکیشن خود را بسازید
این برنامه از سرویس Google Voice برای تبدیل فرمان صوتی شما به رشته مربوطه استفاده می کند که با استفاده از مدار UART (فرستنده گیرنده ناهمزمان جهانی) در میکروکنترلر Tiva خوانده می شود. برای مطالعه بیشتر می توانید دیتاشیت سری تیوا سی را مطالعه کنید.
uart رشته را دریافت می کند و کد بر روی میکرو کنترلر اجرا می شود.
در پروژه خود، از پین های برد تیوا به عنوان پایه های GPIO استفاده کردیم و عملکرد موتورها را از طریق تغییر سطوح منطقی روی پین ها کنترل کردیم. برای ماژول بلوتوث، پین ها برای عملکرد جایگزین به عنوان پین های UART پیکربندی شدند. به منظور تغییر سرعت موتورها، پین ها در عملکرد جایگزین به عنوان پین های تایمر پیکربندی شدند و از حالت PWM استفاده شد. سرعت با تغییر چرخه وظیفه چرخه ساعت ورودی کنترل می شد. برای قسمت اجتناب از مانع، تایمر برای تنظیم فرکانس و در نتیجه کارکرد سنسور پیکربندی شده است.
مرحله 1: سخت افزار و قطعات
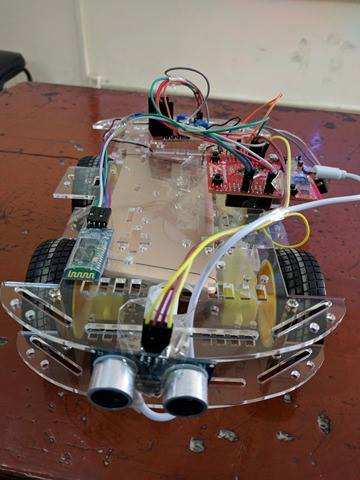
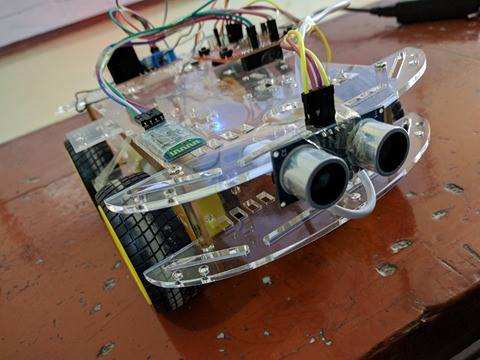
اولین قدم جمع آوری تمام اجزای این پروژه است. بنابراین در اینجا اجزای مورد نیاز شما وجود دارد:
شاسی خودرو (چهار چرخ)
Tiva Launchpad (TM4C123H6PM)
ماژول بلوتوث (HC-06)
درایور موتور (LM298N)
برنامه کنترل صوتی BT
