

در این ویدئو؛ مونتاژ دستی ربات سه بعدی، کنترل سروو، کنترل سنسور فلکس، کنترل بی سیم با nRF24L01، گیرنده آردوینو و کد منبع فرستنده موجود است. به طور خلاصه، در این پروژه یاد می گیریم که چگونه یک دست ربات را با دستکش بی سیم کنترل کنیم.
مرحله 1: آموزش تصویری

با این فیلم آموزشی می توانید مونتاژ بازوی رباتیک و موارد دیگر را مشاهده کنید. من یک ویدیو اضافه کردم زیرا برخی از قسمت های مجموعه بازوی رباتیک بسیار دقیق است.
مرحله 2: سخت افزار و ابزار مورد نیاز
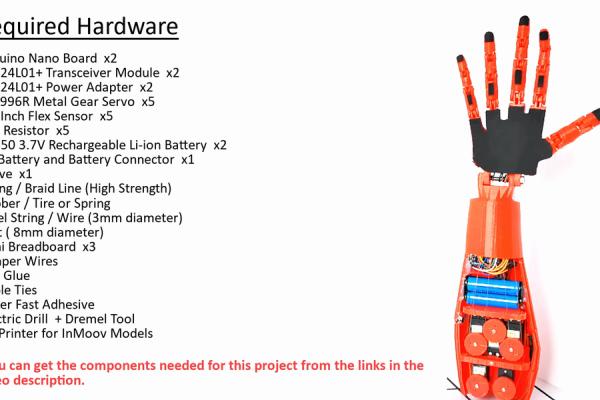
سخت افزار مورد نیاز
2x برد آردوینو (نانو) — http://bit.ly/2HaRyrj
فرستنده گیرنده 2x nRF24L01+ — http://bit.ly/2sCG7nd
آداپتور 2x nRF24L01+ — http://bit.ly/2soia3t
سروو 5x MG996R — http://bit.ly/2kDLHlm
سنسور فلکس 5× 4.5 اینچی — http://bit.ly/2J3hfQp
مقاومت 5x 10k — http://bit.ly/2xuM6jC
2 عدد باتری 3.7 ولتی 18650 — http://bit.ly/2LNZQcl
