

در این مقاله پروژه ای را منتشر می کنیم که جنبه های مختلف رابط موتور آردوینو-گیر را توضیح می دهد. موتور دنده ای یک موتور DC با طراحی ویژه است که مجموعه دنده آن به افزایش گشتاور و کاهش سرعت کمک می کند. در مقایسه با یک موتور DC معمولی، حداکثر دور در دقیقه که یک موتور دنده می تواند تولید کند کمتر است. اما این مزیت را دارند که با استفاده از ترکیب صحیح دنده ها می توان دور آن را به هر مقدار مطلوبی کاهش داد. بر خلاف سروو موتور، موتور دنده نیز می تواند به طور مداوم بچرخد. جهت موتور دنده را می توان به سادگی با معکوس کردن قطبیت اتصال باتری معکوس کرد. و سرعت موتور را می توان با تغییر سطح ولتاژ در آن کنترل کرد. یک آی سی درایور موتور به نام L293D در اینجا برای اتصال موتور دنده با آردوینو استفاده می شود.
بیایید آموزش خود را شروع کنیم و یاد بگیریم که چگونه رابط موتور IC L293D-Arduino-Gear انجام می شود.
اهداف پروژه
- رابط موتور دنده با آردوینو.
- تولید کد برای چرخاندن موتور به جهت دلخواه.
- کنترل سرعت موتور با استفاده از پتانسیومتر
اجزای مورد نیاز
| جزء | مشخصات | تعداد |
|---|---|---|
| آردوینو | Uno | 1 |
| پتانسیومتر | 10 هزار | 1 |
| راننده موتور | L293D | 1 |
| آداپتور | 9 ولت، 1 آمپر | 1 |
| موتور DC دنده ای | (6-12) V | 1 |
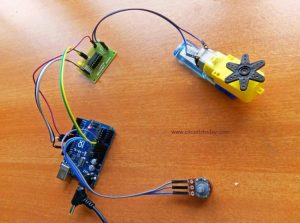
مدار
مدار را همانطور که در نمودار نشان داده شده است جمع آوری کنید. کامپوننت و اتصالات در زیر توضیح داده شده است.
توضیح مدار
در مدار از Arduino UNO به عنوان پلتفرم استفاده می شود. گیربکس از طریق درایور موتور IC L293D به آردوینو UNO متصل می شود. همانطور که قبلا ذکر شد، یک آی سی درایور موتور شامل دو مدار پل H است که می تواند برای کنترل دو موتور به طور همزمان استفاده شود. L293D دارای 4 پایه ورودی، 4 پایه خروجی، 2 پایه فعال، Vss، Vcc و GND است. Vcc ولتاژی است که برای عملکرد داخلی خود به آن نیاز دارد. L293D از این ولتاژ برای راندن موتور استفاده نمی کند. برای راندن موتورها، پیش بینی جداگانه ای برای تامین منبع تغذیه موتور در مقابل وجود دارد.
در اینجا ما فقط از یک موتور DC استفاده می کنیم، بنابراین از دو پایه ورودی اول آی سی به تنهایی استفاده می شود. اینها به هر دو پین دیجیتال آردوینو متصل می شوند (در اینجا آنها 10 و 11 هستند). و دو پایه خروجی L293D به یک موتور دنده وصل شده است. پین E1 (Enable Pin) L293D سپس به هر یک از پایههای PWM آردوینو متصل میشود (در اینجا پایه نهم است ) . ما به سادگی میتوانیم موتور را با دادن سیگنال بالا در پایه 10 ، پایین در پایه 11 و بالا در پایه فعال کردن، راه اندازی کنیم. پایه دهم و یازدهم آردوینو برای کنترل جهت چرخش و پایه نهم برای تنظیم سرعت موتور استفاده می شود . تنظیم سرعت با تولید یک سیگنال PWM در پین فعال IC L293D به دست می آید.
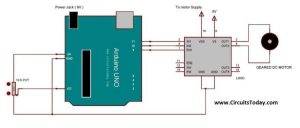
یک پتانسیومتر در این پروژه برای تعیین قدرت سیگنال PWM که قرار است در پین فعال داده شود استفاده می شود. پایه خروجی از پتانسیومتر به A0 (پایه آنالوگ) آردوینو متصل می شود. با تغییر پتانسیومتر، ولتاژ در پایه A0 از 0 تا 5 ولت تغییر می کند. این سیگنال آنالوگ متغیر به مقدار دلخواه نگاشت شده و برای تولید سیگنال PWM استفاده می شود.
بیشتر بخوانید: رابط موتور دنده آردوینو با استفاده از IC L293D
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
In this article, we are publishing a project which explains different aspects of Arduino-Gear motor interface. Gear motor is a specially designed DC motor whose gear assembly helps in increasing the torque and reducing the speed. Compared to a normal DC motor, maximum rpm a gear motor can produce is less. But they have the advantage that by using the correct combination of gears, its rpm can be reduced to any desirable value. Unlike servo motor, gear motor can also be rotated continuously. The direction of the gear motor can be reversed by simply reversing the polarity of the battery connection. And the speed of the motor can be controlled by changing the voltage level across it. A motor driver IC named L293D is used here for interfacing the gear motor with Arduino. L293D consist of two H-bridge designed using 4-transistor circuit that helps us to reverse the direction of rotation and to control the speed of the DC motor.
Let’s begin our tutorial and learn how IC L293D-Arduino-Gear motor interface is done.
